LiDARの開発と応用(第4回)
– 自動車への応用(その1) –
2020-05-27(令和2年) 豊岡秋久
2020年1月22日の第1回および4月22日の第2回で紹介した様に、LiDARは、Light Detection and Ranging (光検出と測距)もしくはLaser Imaging Detection and Ranging (レーザー画像検出と測距)の略で、光を用いたリモートセンシング技術の一つである。今回および次回は、自動車関連分野に関する応用、特に自動運転のセンサーとしてのLiDARを中心に紹介する。(今回は自動車企業での状況を報告し、次回はLiDAR開発企業の状況を紹介) 自動運転においては各種のセンサー技術が開発され、一部は実用化されつつある。その一つとしてLiDARは重要な位置を占めるものであり、世界の多くの研究所、企業(大手自動車企業からスタートアップまで)において研究開発が進められている。
(As explained in the reports dated January 22 and April 11, LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remote-sensing technologies applying optics. In this report as well as the following one, applications of LiDAR for automobile, especially for autonomous driving, are introduced focusing on car manufactures in this report, and LiDAR vendors in the following report. As for the autonomous driving, various types of sensor technologies have been developed and some of them have been already applied to commercial vehicles. Among such sensor technologies, Lidar is positioned as the important one, which is under development in many laboratories, enterprises from big names to start-ups.)

図1 (出典:CarWatch) レクサスLS 500hをベースとしたLiDAR搭載実験車両
- 自動運転の現状とLiDARの採用に関して
TokyoExpress のLiDARの開発と応用(第1回)においても紹介した様に、LiDARの自動車への応用の開発は2005年辺りから始まっている。現在では、自動運転を目指す一部の車には採用されるまでとなっている。ここでは、現段階での自動運転の開発および利用状況の概要およびLiDARの採用における課題を述べる。
1.1 自動運転に関しての現状の状況
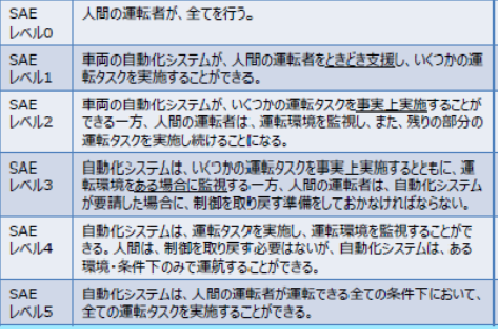
自動運転技術には、車に搭載されている技術の段階に応じて0から5までのレベルが設定されている。図2は、SAE(Society of Automobile Engineers; 米国自動車技術者協会)における自動運転のレベルを示したものであり、各レベルでの定義は、自動化された制御システムを全く持たない車両(レベル0)から、完全に自動化された車両(レベル4)までの全ての範囲をカ バーする。
レベル0(自動運転なし)
ブレーキやアクセル等の速度の加減速やハンドル操作に関するサポートが一切取り入れられていない状態を指す。すべての操作を運転手本人が行わなければない。現在、国内を走っている車の多くはレベル0のものだと考えられる。
レベル1(運転支援)
ハンドルの操作、ブレーキやアクセルなど加減速の調整のどちらかをサポートする技術が搭載された状態を指す。「自動ブレーキ機能」は自動運転技術レベル1に相当するもので、歩行者や障害物を検知して自動的にブレーキをかけるという運転支援を行う機能。2015年以降に販売された新車の45%に搭載されている。(2021年11月から国としてこの自動ブレーキ機能の搭載を義務化することが発表されている。)
レベル2(高機能化)
ハンドルの操作、ブレーキやアクセルなど加減速の調整のどちらもサポートする技術が搭載された状態を指す。自動運転では無く、あくまで運転支援という意味ではレベル1と同じであるが、ハンドル操作と加減速の調整のいずれも自動で行われる。
レベル3(条件付自動運転)
特定の場所においてシステムが全てを操作し、緊急時には操縦者が対応するというレベルの車を指す。「運転支援」においては事故などの責任は運転者にあるが、レベル3以降の「自動運転」においてはメーカが責任を負うようになると考えられている。(今後の法規制の動きを確認する必要がある。)
レベル4(特定条件下における完全自動運転)
「特定の場所においてシステムが全てを操作する」という技術段階で、レベル3との違いは「緊急時でも操縦者が対処する必要はない」という点にある。ただ、完全自動運転を行うのは高速道路などといった特定の場所のみであり、それ以外の場所では運転者が全ての操作を行う必要がある。この段階の技術はまだどこのメーカも実装には至っていない状況である。
レベル5(完全自動運転)
いかなる場所でも完全にシステムが運転を行うという、自動運転技術の完成形である。この段階において、人間は一切の操縦を行う必要がないため、車のデザインもハンドルやブレーキといった操作系統を排した、全く新しいものになるだろうと考えられている。レベル5の実用化がいつになるかは現状どのメーカも具体的には発表していないが、欧州連合や中国が示したロードマップにおいては、2030年代が一つの目安として考えられている。
表1は内閣府が示している自動運転のレベルの定義である。
表1 (出典:内閣府) SAEの定義に基づく自動運転のレベル
1.2 LiDAR採用の課題など
2020年1月29日付けの日経ビジネスによれば、下の見解(筆者が抜粋)が示されている。
今回のCES(2019年1月)で実感したのは、自家用車向けの自動運転技術が当初思われていたよりも足踏みしていること。「自家用車の自動運転レベルは当面2+(各社により定義は異なるがレベル2に対してより進んだ機能が付加されているとの意味)にとどまる」としている部品メーカもある。
レベル3の自動運転は、レベル2のようなシステムや環境の監視義務はないもののシステムが対応できないような状況に陥った場合には、運転を人間に戻すことになっている。人間は、周辺監視やシステムの監視義務はないものの、システムからいつ運転が戻ってきてもいいように備えていなければならない。それまで運転をしていなかったのに、クルマから「運転を代わってくれ」と言われてすぐに適切な運転動作をするというのは難しいだろう。このため完成車メーカによっては「レベル3は非現実的」と言っているところもある。
これまでの予測だと、2020年は完成車メーカ各社から一斉にレベル3の自動運転車が商品化されるとみられていた。レベル3を実現するにはLiDAR(ライダー)が必須とされており、これを見越して部品メーカ各社はレーザーを使うセンサー「LiDAR」の開発に取り組んできた。しかし、レベル3の自動運転車の実用化が遠のけば、その分、LiDAR市場の拡大は遅れ、部品メーカ各社の投資回収は遅れる。
自動運転車の世界では、このLiDARに、ミリ波レーダー、カメラの3種類のセンサーを加えて「三種の神器」と呼んでいる。レベル3以上の高度な自動運転を実現するためにはこの3種類のセンサーを組み合わせることが必要だとされてきた。カメラ、レーダー、LiDARにはそれぞれ長所と短所がある。カメラは物体の形状や色は分かるが距離を直接知ることはできない(ステレオカメラを除く)、レーダーは周囲の物体の有無や物体との距離を知ることはできるが、物体の位置や形状を精密に知ることはできない。LiDARは物体の有無や距離、それに物体の位置や形状まで精密に知ることができるが、ミリ波レーダーに比べると雪や雨などの悪天候に弱い。
三種の神器の中でカメラとミリ波レーダーはすでに大量に採用されており、コストもかなり低下している。これに対し、LiDARはまだ新しいセンサーであるため、コストが高い。加えて、システムを冗長化したり、高度な処理用半導体を採用したりしなければならないコストなどがかさみ、レベル3の自動運転機能を搭載した車両は、現時点で相当高価にならざるを得ない。
部品メーカ各社は、レベル3以上の自動運転機能は技術的には実現可能だが、コスト的に商品性がないと判断している。一方で、商業用の車両では、運転手の数を減らせる、あるいは運転手の負担を軽減できるという点で商品性があるとみており、レベル3、そしてその先のレベル4は商業車が先行すると部品メーカ各社は考えているようだ。ただし、商業車は自家用車に比べるとはるかに販売台数が少ないので、やはりLiDAR市場の拡大はスローペースにならざるを得ないだろう。
- 日本の自動車メーカの自動運転へのLiDAR採用動向
以下の内容で、LiDAR開発メーカ(以下*印を付けた企業)に関しては次回で紹介する。
2.1 トヨタ
トヨタは、自動運転のセンサー技術の開発に関しては、今のところ絞り込みはせずに、カメラ、ミリ波、LiDAR等の技術を検討している段階である。下の図はトヨタの基本的な考え方であり、カメラ、ミリ波レーダー、LiDARを複数採用するものである。
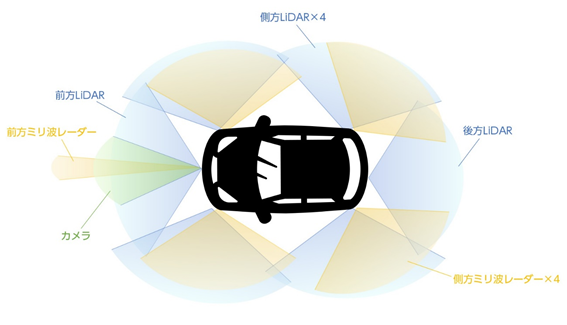
図2: (出典:『Toyota technical review 2017/05』を参考にビジネス+IT編集部で作成) トヨタの自動運転車のセンサーに関する基本的な構想
トヨタは米国のBlackmore*やLuminar*など複数のLiDAR関連スタートアップ企業と提携している。Blackmoreへは出資しており、Luminarには2017年9月にLuminarのLiDARの採用を公表している(Blackmoreは、元Googleの自動運転開発トップが創業した米スタートアップ企業のAuroraに買収されている)。トヨタは新たなセンサー技術についても検討を続けており、技術の絞り込みにはまだ積極的ではない模様。デンソーもLiDARの開発を進めており、トヨタはデンソーの製品の想定顧客の一つとしている。
2019年のCES(Computer Electronics Show)では、人工知能技術の研究・開発を担うトヨタのアメリカ現地法人であるトヨタ・リサーチ・インスティテュート(TRI)がTRI-P4という現行型「レクサスLS」をベースとした実験車両を公開した。この車両には、「ガーディアン」(高度安全運転支援システム)と「ショーファー」(自動運転システム)という2つの自動運転システムが搭載されている。
センサーについては、2つのカメラを追加することで両サイドの認識性能を高めているほか、自動運転車用に設計された2つの画像センサーを前方と後方に追加。レーダーシステムも車両周辺の近距離の視野を向上させるべく最適化している。また前モデルである「Platform 3.0」より、8つのスキャニングヘッドを持つLIDARシステムを現行型LSのデザインにあった形状としつつ踏襲している。自動運転システムの頭脳として機能するコンピューターについても“賢さ”の向上を図っており、より高い計算能力と機械学習能力と、より早い学習能力を実現している。

図3:(出典:CarWatch) 実験車両に搭載されたセンサーの例
2.2 日産自動車
日産の開発部門の見解では、現時点では、LiDARはレーダーとカメラの最新技術の能力を超える能力を欠いており、LiDARのコストと機能のバランスが悪いとしている。当面はLiDARの採用には否定的な方針が出されている。日産の発表した自動運転技術は、事前に定義されたルート上の高速道路上の単一車線でのハンズフリー運転を可能にするものである。この技術は、レーダーセンサーとソナーセンサーをカメラと共に使用して、自動車が周囲を「見る」ために必要な3次元マッピングデータを編集する。ソナー、サイドレーダー、周辺監視カメラとは別に、広い視野を捉えるために車両の正面と側面の3点に焦点を合わせる「トライカム」を開発予定。
車両の周囲360度のセンシングに使用するのは、カメラ7個、ミリ波レーダー5個、超音波ソナー12個だ。レーダーとソナーは新開発の高解像度なものを採用した。7個のカメラのうち、4個はアラウンドビューモニター用に車両の近くを監視しており、残り3個が前方を監視する。前方監視用のカメラは画角や焦点距離の異なる3つのレンズを並べた「トライカム」である。画像処理はMobileye*の最新チップ「EyeQ4」で行う。
今後の自動運転技術の進化については、「レベル3以上の壁はとても遠い。自動車メーカとして事故の責任を負えると断言できる、完全自動運転でなければならない。レベル2を磨き続ける期間は長く続く」と考えている。
2.3 ホンダ
ホンダは自動運転戦略として、センサーシステムの2重化を進めている。2019年7月4日に開催した技術展示会「ホンダミーティング2019」で、2020年以降に実用化を目指す自動運転システムを公開。高速道路の複数車線における「レベル3」に向けた自動運転に対応したもので、2組のセンサーシステムを使って冗長性を高めたのが特徴である。システム構成を見ると、車両の周囲を監視するセンサーとして、「単眼カメラとミリ波レーダーを使うシステム」と、「単眼カメラとLiDARを使うシステム」の2組を搭載し、 全周360度の検知可能として2重化している。前方には2系統のカメラに加えて高精度地図を活用する。ブレーキ、ハンドル、電源も含めて2重化され、ドライバーを認識するカメラも高精度モニターが装備されている。これにより長距離ドライブの疲労軽減に劇的に貢献できる。早いタイミングで高速道路に限定したレベル3のホンダ車を見ることができそうである。
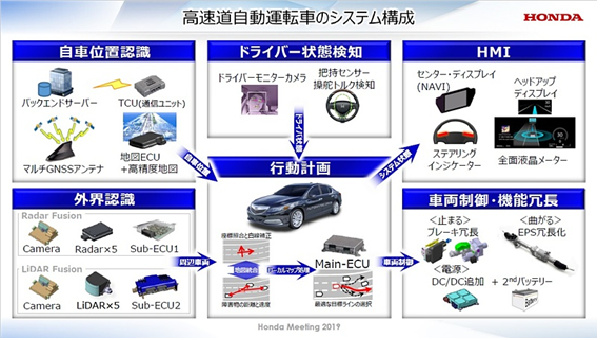
図4 (出典:CarWatch) 高速道路における自動運転車のシステム構成 (LiDARとカメラの組合せたセンサーシステムが適用されている。)
渋滞時の自動運転について、レベル3ではクルマ側で自動運転の条件が満たされなくなった場合、ドライバーに運転を任せなければならないが、その情況をドライバーに視覚表示、音警報で知らせ、さらにそれでも運転手が操作の意思を示さなかった場合はシートベルトの締め付けなどで段階的に警告する。それでも運転手が対応しないときはシステムが安全を確保しながら減速し、路肩に寄せて緊急停止を行なう機能も備える。
さらに、レベル3に向けてAI技術を適用し、予知、予測を進化させて複雑な交通環境を安全、安心して走ることを目指している。住宅地などで歩行者などの位置や方向だけでなく顔の向きもAIで判断する独自技術を開発。また飛び出しなどに備えた高度な判断もAIで行う。歩行者、他の車との協調行動もAIが解析して、スムーズな走行、合流などを行い、ベテランドライバーのような判断を行う。
2.4 スバル
スバルは、ステレオカメラ中心で自動運転の対応を進めている。LiDARの採用には後ろ向きである。
2020年代前半に運転支援システム「アイサイト」の新世代版を投入する。新世代アイサイトでは、ステレオカメラを刷新して視野角拡大や画像処理性能を高めるとともに、ミリ波レーダーとステレオカメラを連携させて運転支援機能を充実させる。
尚、ミリ波レーダーの代わりにより詳細な情報が捉えられるLiDARも検討したが、情報量が多くなり、処理に膨大な負担がかかること、ライダーのコストが高いことで採用しない方針とした。
ステレオカメラの改良によって実現する機能としては、右左折時の横断歩道の歩行者や、右折時に直進してくる対向車の検知がある。これまでステレオカメラのみでアイサイトの機能を実現してきたが、ミリ波レーダーによる周辺監視が加わることにより、出会い頭での衝突回避や、高速道路での車線変更支援、渋滞時のハンズオフ機能を追加する。
また、次世代アイサイトでは、ステレオカメラの認識とAIの判断を融合する。これによって安全を確保するための認識・判断能力を向上し、車線が消えている道路で、周辺車両の動向を予測するなど、さまざまな道路で安全性を確保する。

図5 (出典:日刊自動車新聞電子版) アイサイト・バージョン3に採用されている日立オートモティブシステムズ製のステレオカメラ
- 海外の自動車メーカ各社の動向
3.1 General Motors (GM)
General Motorsは、経営再建後は自動運転分野の開発を加速しており、2016年には自動運転技術を開発するベンチャーのCruise Automationを買収。レーダーや超音波センサー、カメラ、GPS地図データを活用し、自動ブレーキ、全車速域対応の定速走行・車間距離制御装置、車線維持システムなどの複数の運転支援技術を統合した全方位衝突防止を備えるSuper Cruiseの商用化開発を進めている。現行の法整備状況から自動運転レベル2(部分運転自動化)扱いとなっているが、実質的な機能は自動運転レベル3(条件付き運転自動化)に相当すると言われている。
ADASをはじめとした自動運転開発や実用化にあたっては、2017年にLiDARを開発する米国のスタートアップ企業であるStrobe*を買収している。Cruise Automationが開発を進める自動運転EVの実用化の場としてライドシェアやタクシー市場に主眼を置いている。このために、Chevrolet Boltを用いたドライバー不要の完全自動運転車の量産モデル(第3世代)を発表したほか、ステアリングホイールやアクセル・ブレーキなどのペダル、手動操作用のスイッチ類を備えない自動運転レベル4(高度運転自動化)相当の無人自動運転車「クルーズAV」を発表。センサーとしては、LiDAR5個、ミリ波レーダー21個、カメラ16個を搭載予定としている。

図6 (出典:Cruise Automation) GMの開発した自立走行車Origin
Cruise Automatonのロボタクシーサービスはサンフランシスコで始まる予定だが、時期は未定となっている。(一時は、2019年に開始を計画していたが、19年7月にスケジュールを撤回した経緯がある。)
3.2 Ford
Fordは、2021年までに自動運転レベル4実用化する方針を出している。2000年以降、国防高等研究計画局(DARPA)主催のロボットカーレースへの参戦や、ブレーキ支援や衝突警告システムなどをテストするため試験車両を米国25州で走行させるプロジェクトなど地道に行って来ている。2012年には、ビル・フォード会長が自動運転レベルを段階的に発展させて行く方針を打ち出している。
2015年にカリフォルニア州で自動運転走行試験の許可を取得し、パロアルトに研究センターを開設するなど研究開発を本格化。2016年には、自動運転レベル4(高度運転自動化)を2021年までに実用化し、ライドシェアなどの配車サービス向けに供給することを発表したほか、モビリティサービス企業へと転換する計画も発表している。
当初は段階的に自動運転レベルを進化させていく予定だったが、自動運転レベル3(条件付き運転自動化)の技術はレベル4と同程度に困難であると判断し、一段飛ばしてレベル4の開発に焦点を当てている模様。
一方で、提携や買収で開発力の強化を行っている。2016年8月には、LiDAR開発大手の米Velodyne社へ7500万ドル(約84億円)の出資を発表。LiDARを一般の車に搭載するため、低価格で量産が可能な開発体制構築を支援している。また、機械学習やコンピュータービジョン開発を手掛けるイスラエルのスタートアップ・SAIPS社を買収したほか、生体認識技術や画像処理技術を持つ米国のNirenberg Neuroscience社と独占ライセンス契約を結ぶなど、自動運転開発に向け大きく動き出した。
2017年2月には、AIシステム開発を手掛ける米スタートアップのArgo AI社に5年間で10億ドル(約1130億円)の出資を発表した。Argo AIは、GoogleグーグルとUberで自動運転の開発にあたっていた技術者2人が2016年11月に設立したばかりで、創業間もないスタートアップへの出資は、2016年に自動運転スタートアップのCruise Automationを買収したGeneral Motorsの対抗心の表れとも言える。Argo AIは、現在ではFordのバーチャルドライバーシステムをはじめとした技術開発の柱を担っており、自動運転戦略の中心的存在に育っている。
2017年10月には、Argo AIがLiDAR開発で独自技術を持つスタートアップのPrinceton Lightwave*社を買収。Princeton Lightwaveを加えることでArgoはセンサハードウエアと、センサーとソフトウエアのインタフェースの両方で技術革新を起こすユニークなポジションを得る。また、Princeton Lightwaveの技術は、悪天候条件、高速運行時などの厳しい環境において、対象物の発見を間違いなく行い、自動運転システムに役立つとしている。
2018年7月には、Fordの自動運転開発部門を独立させ、新会社 Ford Autonomous Vehiclesを設立したと発表。新会社はArgo AIと連携しながら自動運転開発を担う。これに伴い、Fordは2023年までに計40億ドル(4440億円)を追加投資することも発表した。
フォードモーターとドミノのピザがミシガンで自動運転のピザ配達車をテストするために使用したFord Fusionハイブリッドレベル4自動運転車は、2018年の米国ミシガン州デトロイトのコボセンターでの北米国際自動車ショーで展示された。

図7 (出典:REUTERS Technology News) 北米国際自動車ショーで展示されたビザ配達用の自動運転車
3.3 FCA(Fiat Chrysler Automobiles)
FCAは自動運転の開発に関して各社と協力関係を実行することで進めている。
2019年6月、Auroraとの覚書(MOU)に署名、強力な提携関係を確立して、Auroraの技術を搭載する自動運転の商用車をFCAが開発および販売することを目指している。Auroraは「Aurora Driver」ハードウェアとソフトウェアをFCAに提供し、FCAはそれを同社の商用車に搭載する予定。Auroraは、2019年5月に、LiDAR(ライダー)を開発するBlackmoreの買収を発表。その直前には、Amazonなどが支援するベンチャーキャピタルグループ主導のシリーズB資金調達ラウンドで、5億3000万ドル(約570億円)を獲得している。
また、自動運転の開発会社であるAutoX(中国系ベンチャー企業、シリコンバレーで起業)との提携を発表し、アジア市場向で最初となるRoboTaxiの開発を進めている。 RoboTaxiは、安全のためのドライバーの乗車を必要としないレベルにおけるハードウェア品質と安全設計をベースに設計されており、アジアの交通環境で、無人のタクシーサービスをサポートできるとしている。AutoXのRoboTaxiは、先行しているWaymoと同じレベルの自律性を達成していると報じられている。
AutoXは、ソリッドステート式LiDARセンサーを含む自動車向けセンサーの採用を目指しており、LiDARの開発は、Robosense*とDJI*の2社とパートナーを組んで進めている。:RoboTaxiで使用されるLiDARは、Robosense のMEMS方式(LiDAR (M1シリーズ)とDJIのソリッドステート方式のLiDARである「Horizon」および「Tele-15」を組み合わせたものである。

図8 (出典:Autonomous Vehicle Technology ) FCSのPacifica;360°のソリッドステート方式LiDARの他に多くの高精細カメラ、死角用のLiDAR、レーダー等を装備。
3.4 Mercedes Bentz
メルセデスベンツの自動運転の開発については、約30年に及ぶ。1986年からヨーロッパの「ユーレカ」研究イニシアチブの枠組みの中で、PROMETHEUSプロジェクト(最高の効率性と前例のない安全性を備えた欧州交通のためのプログラム)に取り組んでおり、さまざまな技術やセンサーシステムの研究を今なお続けている。
すでに高レベルの自動運転技術を獲得しており、2016年には、自動運転技術「CityPilot」を搭載した半自動運転バス「Future Bus」の走行試験を、公共交通として成功させている。十数台のカメラが道路とその周辺をスキャンし、長距離レーダーと短距離レーダーのシステムは常に先行するルートを監視する。都市インフラと協調しながら走行し、障害物や歩行者を認識して自動でブレーキをかけるほか、バス停に近づくと自動でドアを開閉する。運転席に座るドライバーはほぼ何もせず、基本的には有事に備えているだけだ。
LiDARに関しては、米国に本拠を置くVelodyne LiDAR*社に2017年9月に完全自動運転車の開発のためのセンサーを発注。Velodyne LiDAR社は1983年に設立。米国カリフォルニア州シリコンバレーに本拠を置き、車両の周囲の物体を検知するセンサー、LiDARなどを手がける。2005年には、世界初の3DリアルタイムLiDARセンサーを発明して、特許を取得。

図9 (出典:RESPONSE) メルセデスベンツの実験車に搭載されたVelodyneのLiDAR
今回、メルセデスベンツは、完全自動運転車の開発を進めるにあたり、重要サプライヤーとしてVelodyne LiDAR社を選定。同社はメルセデスベンツに、「VLP-32C Ultra Puck」センサーを納入していく。メルセデスベンツは自動運転を実現するために、異なる複数のセンサーを統合したシステムを開発中。これに、Velodyne LiDARのセンサーが含まれるようになる。各種センサーのデータを組み合わせた状況分析を継続的に行う予定であり、自動運転車が、安全な軌道を確実に走行できるようにすることを目指す。
3.5 BMW
BMWは、自律走行車にLiDARを搭載するため、カナダを本拠とする自動車部品大手のマグナと、そのパートナーであるイスラエルのLiDARメーカInnoviz*と契約したことを明らかにした。契約に関する十分な詳細情報が提供されておらず、現時点でBMWがセンシング技術をどう活用する計画なのかは不明である。だが、強力な自律走行車のほか、半自動運転のクルマにも搭載されるとみられる。BMWは半自動運転技術の開発を、テスラの「オートパイロット」やキャデラックの「Super Cruise」などに対抗するかたちで進めている。今回の発表は、この分野におけるセンシング技術の重要性を示している。
Innovizの製品の特長は以下の通りである。
ソリッドステートLiDARの最初の連続的生産契約
レベル4およびレベル5の自動運転システムをサポート
Innoviz TechnologiesのソリッドステートLiDARは、コンパクトなサイズで競争力のあるコストで自動車メーカの基準を満足
Innovizによると、同社のLiDARはソリッドステート方式を採用しているため、コストが100ドル単位とのこと。この数年で登場した設計手法であり、多くのLiDAR開発企業に広がっている。イノヴィズのLiDARは、レーザービームの方向を変えるのに幅わずか数mmの小さな鏡を使っている。Velodyneが開発したような機械的に複雑な回転機構ではなく、よりシンプルなものであり、安価につくれる上に、悪路に耐える丈夫さも簡単に実現できるとしている。

図10 (出典:OPTINEWS) BMWが採用したInnoviz社製のLiDAR
3.6 Audi
Audiの自動運転開発は2000年代早期にすでに始めており、2005年開催の米国防高等研究計画局(DARPA)のロボットカーレース「DARPAグランド・チャレンジ」において、スタンフォード大と共同開発した自動運転車が約240キロのコースを1位で走破した。2015年には、Audi A7をベースにした自動運転実験車両「ジャック」で、米カリフォルニア州シリコンバレーからネバダ州ラスベガスまでの公道約900kmを自動運転実験車両で走破。自動運転レベル3以上のシステムを搭載しており、運転席にエンジニアが座らない状態での走行だった。ジャックはドイツのアウトバーンでも最高時速130kmを記録し、高速域での無人走行に成功している。2016年には、自動運転レベル2の運転支援システム「トラフィック・ジャム・アシスト」をAudi Q7やAudi A4に搭載。低速走行時において、15秒間隔でハンズフリーでの走行を可能にした。そして2017年、市販車として世界初となる自動運転レベル3のシステム「Audi AIトラフィックジャムパイロット」を搭載した新型Audi A8を発売。
2018年5月に発表された最新の企業戦略「Audi. Vorsprung. 2025」によると、2025年までに約400億ユーロ(約5.2兆円)をeモビリティ、自動運転、デジタル化といった戦略的分野に投下し、2025年に約80万台のEVとプラグインハイブリッドを販売する目標を掲げている。
A8には量産モデルで世界初の自動運転レベル3を実装。生産モデルとしては世界で初めて自動運転レベル3の技術を搭載したモデルである。トラフィックジャムパイロットは、中央分離帯のある混雑した高速道路や自動車専用道路において、時速60km以下の速度であればドライバーに代わって運転操作を行う。レーダーセンサー、フロントカメラ、超音波センサーに加え、生産車としては初めてレーザースキャナー(LiDAR)も採用しており、セントラルドライバーアシスタンスコントローラー(zFAS)がさまざまなセンサーからのデータを照合・分析することで、車の周辺の状況を常時把握している。
LiDARとしては、米国のLuminar社と協力関係にあり、Luminar社の製品をVWグループとして自律走行の開発を手掛けるAudiの子会社のAID(Autonomous Intelligent Driving)においてテスト中である。AIDはすでに、LuminarのLiDARを搭載した車両を使って本拠地であるドイツのミュンヘンの道路でテストを行っている。2021年中に都市部で完全な自律運転を目指した開発が進められている。

図11 (出典:engadget 日本版)新型Audi A8:緊急時以外の操作を全て自動化できる「レベル3自動運転」を実現すべく開発されたモデル、量産車として世界初となるLiDARをフロントに1基搭載。さらに、5つのミリ波レーダー・5つのカメラセンサー・12基の超音波センサーをあわせて23基ものセンサーを搭載。
3.7 Volkswagen
Volkswagenグループには上記のAudiも含まれるが、以下、それ以外のグループ内でのLiDARに関する動きを紹介する。
Volkswagenグループの一社であるPorsche Automobile Holding は、Lidarのスタートアップ企業のAevaに対して出資し、その次世代センサーの採用を行う事などで関係を強化している。Aevaの次世代センサー(LiDAR) は、PorscheのEVマイクロバスのID Buzz 向けの自律運転のためのセンサーである。
Aevaの最新のLiDAR製品であるAeriesは、120度の視野(従来製品の2倍)を備えているが、従来製品と比較してサイズは半分で、消費電力も少なくなっている。新しいLiDARのすべての機能は1つのチップに収納され、コストは$500程度の予定である。

図12 (出典:Digital Innovative Lab) Volkswagen Group Research の自動運転実験コンセプトカー SEDRIC
自動運転における、課題の一つが歩行者や他の自動車など“動的な”障害物にどう対応するかである。Volkswagen Group Researchのヘルゲ・ノイナー(Helge Neuner)博士は、「カメラ、LiDAR、レーダー等のセンサーのそれぞれに強みと弱みがある。これらを補完的に統合することで、より安全な自動走行が実現できる」としている。具体的には、カメラで障害物のデータを集め、LiDARとレーダーの情報から状況を正しく把握するという考え方である。たとえば電柱の前に別の物体があることをカメラが検知すれば、そこまでの距離を、センサーを切り替えて計測。そのためセンサー類を瞬時に切り替えて情報を集めるための高性能なユニットが必要となる。
レベル3以上に進むための課題が大きいからと言って、フォルクスワーゲンの研究開発がレベル3の実現にとどまっているわけでは無い。同社は2017年の時点で、Genevaでレベル5を実現するコンセプトカー「SEDRIC」を発表している。
SEDRICは、ワンボックスタイプの形状で完全自動運転を目指している。ノイナー博士はSEDRICを「今日でいうタクシーのようになる」と紹介。また、「空車時間を減らし稼働効率を高められる。複数の顧客を同時に乗車させれば、より効率化が図れる。車両間で調整することで、都市部での一定時間内の走行距離が伸びる。その結果、交通渋滞や混雑が減るなど大きな影響を与えるだろう。」と述べている。
3.8 VOLVO CARS
スウェーデンVolvo Carsが、車両周囲の状況を監視するセンサーとしてLIDAR(レーザーレーダー)を標準搭載する方針を決めた。高速道路での自動運転機能を実現するために必要だと判断した。LiDAR開発ベンチャーのLuminar社と提携し、業界をリードするLuminarのLiDARと検知技術を次世代型のボルボの車に導入して行く。第1弾の車両は、2022年に量産を予定する大型SUV(多目的スポーツ車)「XC90」の全面改良車である。
ボルボは高速道路上で自動運転できる機能を2022年に実用化する計画で、それに合わせて中大型車向けのプラットフォーム(PF)を刷新する予定。新PFは「SPA(Scalable Product Architecture)2」と呼ばれる。SPA2で実用化する高速道路上での自動運転機能を実現するためにはLIDARが不可欠だと判断。現行のSPAの車両は、周辺監視用センサーとしてカメラとミリ波レーダーを採用している。緊急時の自動ブレーキや先行車の追従などのADAS(先進運転支援システム)では必要十分だが、自動運転車では「カメラとミリ波レーダーだけでは確保できない信頼性をLIDARで補う必要がある。 LIDARは前方監視用で、天井の前部に埋め込んだ(図12参照)。Volvoがこれまでに公開してきた自動運転の試験車両では大型のLiDARが天井上に搭載されていたが、一般消費者向けに発売する新型車では外観デザインに配慮した。
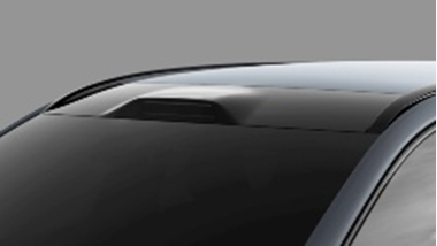
図13 (出典:日経XTEC) 天井に埋め込まれたLiDAR
LiDARの採用によって、Volvo、は高速道路での運転を自動化できるだけではないと考えている。衝突被害軽減ブレーキ(自動ブレーキ)や動物との衝突回避などの機能を向上させることができるうえ、人間が運転しているときでもさらに安全に走行できるようになるとしている。
3.9 TESLA
LiDARに対しては、全く否定的な考え方をしている。2019年4月22日にTesla(テスラ)が初めて行った株主のためのイベントAutonomy Dayで、イーロン・マスクCEOは、「ライダーは無駄な努力だ。ライダーに頼っている人たちに明日はない。将来性がない。高価なセンサーだし、そもそもあんなものは要らない。高価な盲腸がたくさんある人と同じだ。盲腸は1つでも要らない。それを、たくさん身につけているんだ。滑稽だ。」と主張。
TESLAの自動運転化技術としては、標準安全機能として自動緊急ブレーキや正面衝突警報、側方衝突警告、オートハイビームなどを備えており、8台のサラウンドカメラとアップデートされた12個の超音波センサーにより、360度の視界と、最長250mまで先を視認している。最先端の処理技術が採用されたフォワードフェーシング・レーダーはさらなる情報を認識し、豪雨や霧、塵、前方を走る車をも見通すことが可能である。これらのセンサー類のハードウェアから得られる全てのデータを解析するため、前世代の40倍以上の処理能力を持つ新型の車載コンピューターが管理を実行する。
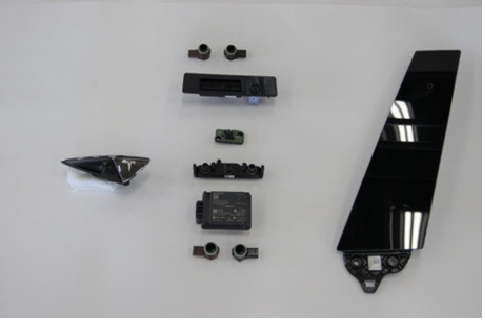
図14 (出典:日経XTECH) TESLAが運転支援・自動運転に使うセンサー群
3.10 Hyundai Motors(現代自動車)
2019年10月、Hyundai Mobisは、Velodyne LiDARと契約を締結し、LiDARをベースとした新しい先進運転支援システム(ADAS)の開発を実施することとした。このシステムはVelodyneのLiDAR技術とHyundai Mobisの認知ソフトウエアを統合するものである。Velodyne製“Velarray”をベースとした本システムは、Hyundai MotorsのADAS向けに特別設計されるものである。
Hyundai Mobisは、レベル3の自動運転用途のLiDARシステムを開発・製造するためにVelodyneに5,000万ドルを投資する計画である。Velodyneの業界をリードするセンシング技術を応用したVelarrayは、一般の車に搭載するのに十分小型であり、ADASアプリケーションの厳しい要件を満たすものである。また、Velarrayは、SAEのレベル2からレベル3のADAS機能をそれぞれの車に合ったデバイスとして提供することができる。
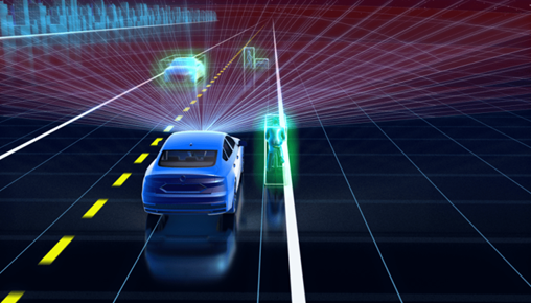
図15 (出典:ROAD TRAFFIC Technology) Velodyne LiDARのVelarray™の機能イメージ
Velarrayの技術は、歩行者と自転車の検出と回避、車線維持、自動緊急ブレーキ、適応型運転コントロール、死角検出、高度な自律ナビゲーション機能を提供するものである。また、Hyundai Mobisのカメラとレーダー技術を使用して、運転者への支援と高度な車両安全のためのセンシング技術も提供する。両社は、2021年にレベル3自動運転用の最初のLiDARシステムを商品化する予定である。Velodyneの創業者は、「Hyundai Mobisや当社の貴重な世界的パートナーと協力することにより、Velodyneの3D LiDARによる認知力を自動車に提供して、世界のユーザのために自動化された安全性を改善して行く。Velodyneとしては、強力なADASシステムは完全な自律運転に対する人々の信頼を獲得し、自律運転への道を開くための足掛かりになれると考える。」と語っている。
―以上―
本稿作成の参考にした記事等は次の通り。
デジタルトランスフォーメーションチャネル2020.4.6自動運転レベルとは?レベル0〜5まで自動運転の基本を徹底解説!
内閣官房 IT総合戦略室 2016年12月7日 自動運転レベルの定義を巡る動きと今後の対応
日経ビジネス 2020年1月29日 ボッシュもソニーも参入するLiDARに試練の時期?
ビジネス+IT 2019.6.27 「LiDAR」とは何か、自動運転で注目の光センサー技術をわかりやすく解説
WebCG 2019.01.04自動車ニュース トヨタ、CESで新しい自動運転の実験車両を公開
CarWatch 2019年1月4日トヨタ、新型自動運転実験車「TRI-P4」を「CES 2019」で公開
JAPAN TODAY TIMES 2019年5月18日 日産自動車はレーダーセンサーとカメラを使用
MONOist 自動運転技術 2019年05月17日 日産プロパイロット2.0、ステアリング手放しの実現には高精度地図が不可欠だった
日経XTEC 2019/07/04 ホンダの自動運転戦略、センサーシステムを2重化
Car Watch 2019年7月5日 ホンダの2030年に向けた取り組みが語られた「Honda Meeting 2019」レポート【交通事故ゼロ社会編】
MONOist 2020年01月22日 スバルのADAS高度化の主役はステレオカメラ、車台にもまだ伸びしろ
Response 20th 2017年6月21日 2020年、スバル「アイサイト」はここまで進化する…車線移動も自動化へ
日刊自動車新聞電子版 2020.1.22 スバルの新型レヴォーグ 自動運転に向けて大きく前進 ステレオカメラ調達先を変更して進化
WIRED MOBILITY2020.01.27 GMが独自につくる最初の自律走行車は、ハンドルがない6人乗りのクルマになる
36Kr Japan 2020.2.5 GMクルーズ、初の無人自動運転タクシーを発表 10年でコア事業を超えるか01101
CNET Japan: 2017.10.31フォード傘下のArgo AI、LiDARセンサを手がけるスタートアップを買収
REUTERS Technology News June 13, 2019 Cheaper sensors could speed more self-driving cars to market by 2022
自動運転ラボ編集部2018年11月26日 フォードの自動運転戦略まとめ 開発状況は?実現はいつから?
CNET News 2019年06月11日 フィアットクライスラーと新興企業Aurora、自動運転技術で提携
Autonomous Vehicle Technology 2020.1.6 AutoX and FCA partner to roll out ‘hardware ready’ RoboTaxi for Asia
Response 2017年9月15日 メルセデス、米ベロダインのセンサーを採用…完全自動運転車開発へ
自動運転ラボ編集部2018年10月25日 メルセデスベンツの自動運転戦略まとめ 重要車種や価格は?
MAGNA HP News Release – Magna Wins LiDAR Business With BMW Group
WIRED 2018.05.22 BMWが選んだイスラエル発の自動運転センサーには、ほかにはない「強み」がある
Optinews 2018年5月22日BMWが選んだイスラエル発の自動運転(Lidar)センサーには、ほかにはない「強み」がある
自動運転ラボ編集部 2018年9月26日 アウディの自動運転戦略まとめ 車種一覧やA8が備える機能
automotive IT December 2018 Audi’s AID subsidiary to partner with Luminar on LiDAR for autonomous vehicles, aims for 2021 deployment
engadget 日本版 2018年9月5日新型Audi A8日本上陸 「レベル3自動運転」めざし、LiDAR含む23基のセンサー
自動運転ラボ編集部2020年5月13日 ボルボ・カーズ、LiDARベンチャーの米Luminarと提携 次世代型車両に導入へ
日経XTEC 2020.5.11 ボルボがLIDAR標準搭載へ、22年に高速道路で自動運転
TC Japan 2019.4.23 「ライダーに依存する自動運転車に未来はない」とイーロン・マスクが主張
自動運転ラボ2018年9月20日 テスラ社の自動運転技術
日経XTECH2019.12.02 完全自動運転を視野、テスラの独自AIチップは2重系に
Business Wire: 2019.10.25 ベロダインがADAS分野で現代モービスとの協業を発表
ライダーベースの新しいADASソリューションは自律運転への重要な足掛かり
ROAD TRAFFIC Technology: 2019.10.24 Velodyne and Hyundai Mobis to develop lidar-based ADAS system
Digital Innovative Lab 2019.03.05 独フォルクスワーゲンの研究開発トップが明かす自動運転の難しさ
Techcrunch December 12, 2019 Aeva snags VW investment with smaller, longer-range lidar