2024-2-8(令和6年) 松尾芳郎
小型月着陸実証機「SLIM」(Smart Lander for Investigating Moon)の最大の目標は「狙った場所への高精度着地」であった。そして目標の「神酒の海」のクレーター「SHIOLI」(栞/しおり)近くの斜面に狙い通りに着地した。この着地技術は今後の月探査に活用されることになるだろう。
(The technology enabling SLIM’s precision moon landing could assist future touchdowns by allowing spacecraft to land in small areas amid rocky terrain.)
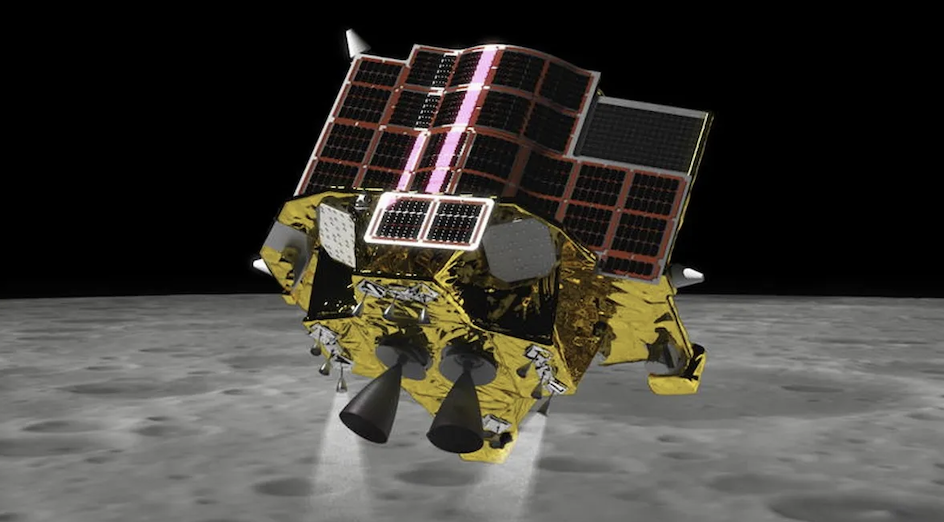
図1:(JAXA)月探査機「SLIM」が着陸する想像図。底面の「推進系パネル/RCS=reaction Control Panel」には大型のメイン・スラスター2本と姿勢制御用小型スラスターが3本ずつ4箇所に描かれている。ピンクの曲面は太陽光を電力に変換するソーラーパネル。中央左右にある灰色の2枚のパネルは着陸用レーダー・アンテナ。
JAXAの月探査機「SLIM」(Smart Lander for Investigating Moon)は2024年1月20日に月に着陸した。着地寸前にメイン・スラスターの1つが故障、着地姿勢が予定通りにならなかったが、最大の目標「ピンポイント着地」では予定地点の100 m以内に着地し成功した。これで日本は世界で5番目の月着陸に成功した国となり、同時に「精密着陸技術」を持つ宇宙開発の先進国としての地位を示すことができた。
これまでの月着陸機は広々とした平原に着陸していたが、今後はこの新技術を使い岩石に覆われた傾斜面にも着陸ができるようになる。精密着地は、特に現在注目を集めている月の南極の探査には不可欠の技術である。南極には氷が多くあるとされ、有人探査の拠点として有望視されている。
「SLIM」は、JAXAが事前のミッション(月周回衛星SELENE“かぐや”)で得たデータをもとに作成した詳しい地図を使い、搭載する「画像照合航法装置(vision-based navigation system)」のカメラで撮影を続けて地形を比較しながら、着地点を目指した。
「SLIM」に搭載したマルチバンド分光カメラ(MBC)は、750nmから1,650nmまでの波長帯を10バンドに分け、10mの距離で0.13cm/pixelの高解像度で観測するカメラである。このカメラ「MBC」は着地後着陸点周辺の岩石とレゴリス(月表面の土壌)を観測する。観測波長は月の主要鉱物である輝石、カンラン石、斜長石などを識別するために予め選定してある。
探査機「SLIM」は、以前述べたように2個の小型ローバーを搭載していて、本体から離れて月面を移動しながら探査する。すなわち、
「LEV 1」(Lunar Excursion 1)は、カメラと計測機器を備え、ジャンプしながら移動する。
「LEV 2」(Lunar Excursion 2)は、両手に収まるサイズの球形で、着地すると半分に割れ、カメラが現れ、両側の半球が車輪となって走行する。
「LEV-2」が写した「SLIM」の着地姿勢は、ソーラーパネルが太陽光に正対しておらず、これで発電力が損なわれる状態になっている。しかし世界で初めて「精密着地技術」を実証した意義は大きい。
米国は、1969年アポロ11号の有人着陸以来、宇宙と月探査の世界でリーダーの地位を占め続けている。それに続いてロシア、中国、インドが月着陸機を送り込むことに成功した。インドの成功はわずか6ヶ月前、1週間前には米国の企業「アストロボテイック(Astrobotic)」が月面着陸に失敗している。
去年(2023年)には、ロシアおよび日本企業「iSpace」が月着陸機を送ったがいずれも失敗した。
NASAは現在大規模、かつ複雑な「アルテミス(Artemis)」ミッションを進めているが、こちらは月周回軌道上に宇宙基地「ゲートウエイ(Gateway)」を設置、月面には広大な有人基地を建設する予定。しかし予定より遅れている。JAXAはこれにも参画して気密室付き探査車を開発し協力を進めている。
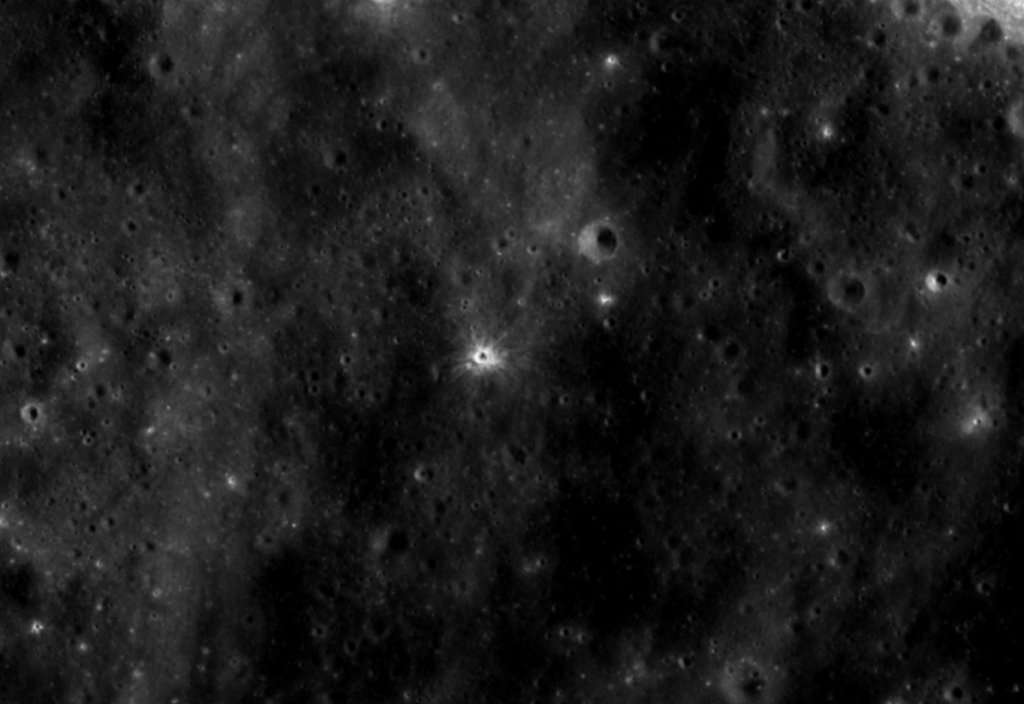
図2:(JAXA)中央に白く光っている場所が着陸目標地点「神酒の海」にあるクレーター「SHIOLI」(栞/しおり)、今回の探査に際し名付けられた。「SLIM」はこの近くに着地した。

図3:(JAXA/Takara Tomy, Sony Group, Doshisha Univ.)月探査機「SLIM」から放出された小型プローブ「LEV-2 (SORA-Q)」が撮影した「S L I M」の写真、着陸寸前にメイン・スラスター1基が故障したためこのような姿勢で着地した。
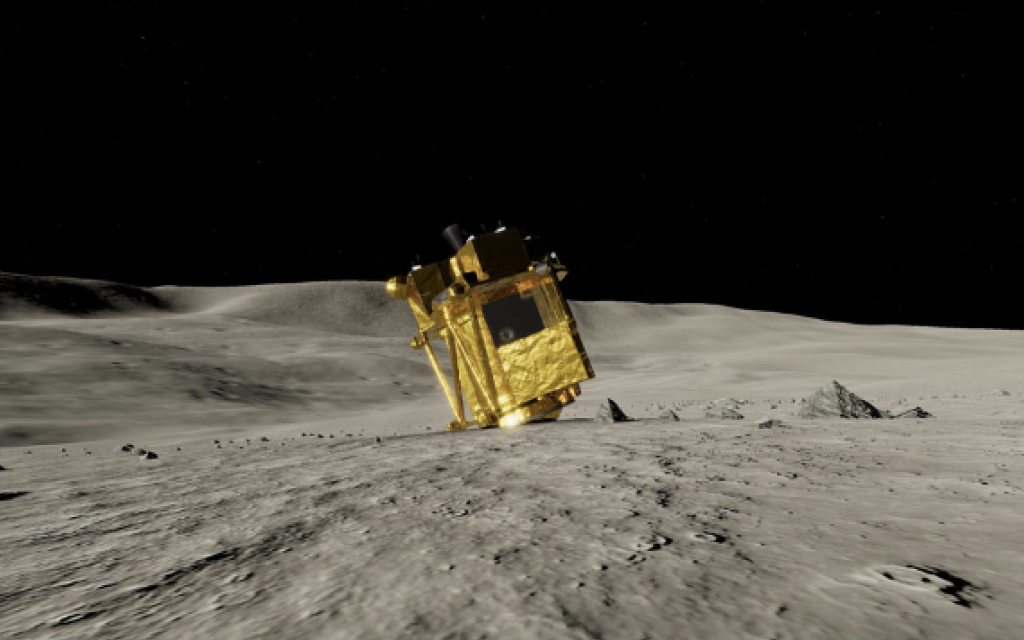
図4:(JAXA/三菱電機) 小型プローブ「LEV-2 (SORA-Q)」が撮影した「S L I M」の写真を基に作成した「SLIM」のCG画像。
月面着地、観測開始、観測結果の経緯
月探査機「SLIM」の打上げから月面着陸、そして観測開始までの経緯を以下の図で示す。
「動力降下フェーズ」に入った後、「SLIM」は計画軌道で降下を開始した。そして「動力降下」終了後、予定通り高度6.2 km付近になり、目標地点に誤差100 m以内で「垂直降下フェーズ」に入り高度50 m付近まで正常に降下を続けた。
しかし、この付近でメイン・スラスターの一つが故障(ノズルの破断)し、着地姿勢が予定と変わり逆さになった。これを除けば最大の目的「狙った場所への高精度着地」することに成功した。以下にその経緯を図で説明する。
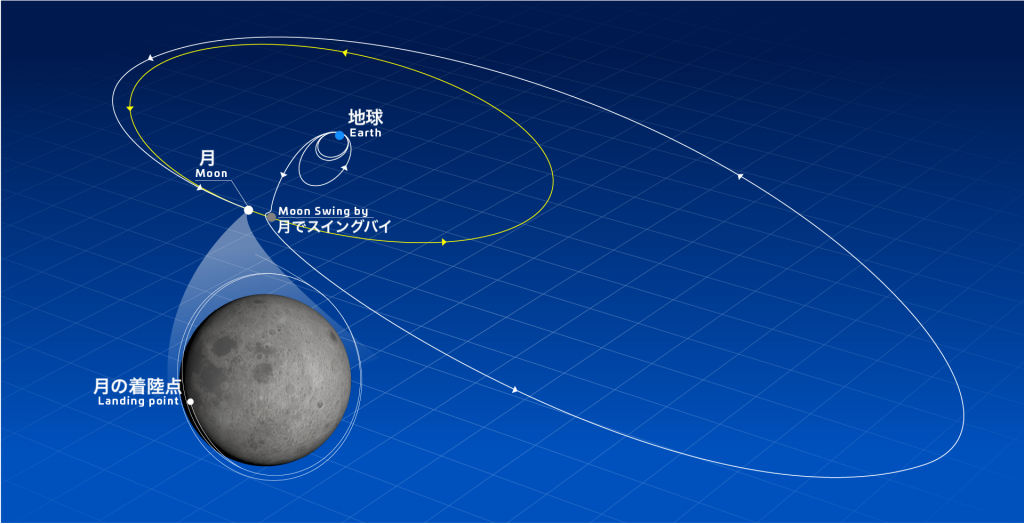
図5:(JAXA Technology) 2023年9月7日8時42分月探査機「SLIM」は、種子島宇宙センターからH-IIAロケット47号機で、JAXAの「X線分光撮像衛星(XRISM)」と相乗りする形で打上げられた。打上げ後14分後に「XRISM」の軌道投入に成功、続いて48分後に「SLIM」は地球周回軌道に入った。「SLIM」は順次軌道を広げ遠地点が月の周回軌道に達してから月の重力を利用してスイングバイを行い、遠地点高度をさらに上げて太陽潮汐力を利用して月との会合ポイントに到着した。そして月周回軌道(15 km x 600 kmの長楕円軌道)に入った。高度15 kmでメイン・スラスターを噴射・ブレーキを掛け着陸準備に入った。
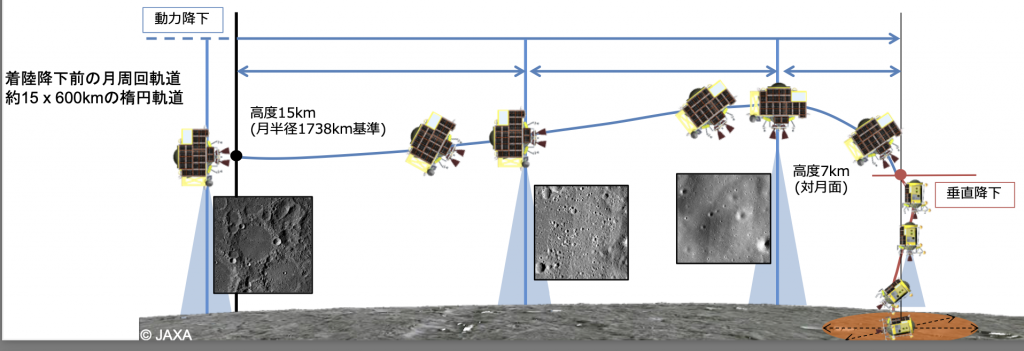
図6:(JAXA)「動力降下フェーズ」の状況。「SLIM」は高度15 kmに降下してスラスター横向きの姿勢で飛行し、高度を徐々に下げ7 kmに降下、高度3,5 kmあたりでメイン・スラスターを下向きにして垂直になる。そして高度3 mでメイン・スラスターを停止、12本の姿勢制御スラスターを使い着陸脚で着地するよう横向きに姿勢を変え、着地する計画だった。
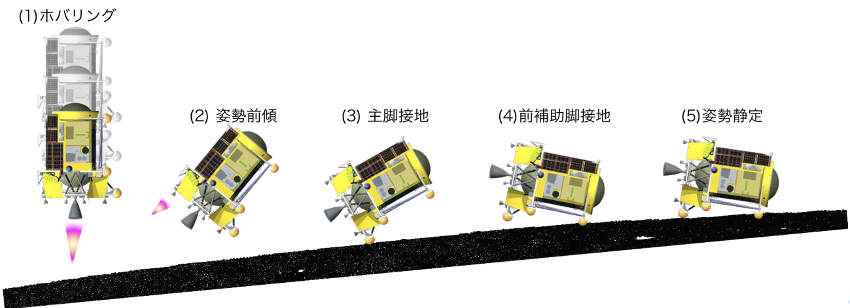
図7:( JAXA)「SLIM」がメイン・スラスターを停止・自由落下に入り高度3 mから着地するまでの順序。クレーター「SHIOLI」(栞/しおり)の近くの斜面にこのような順序で着地する計画だった。

図8:(JAXA)「SLIM」がメイン・スラスター2本を逆噴射し減速しながら「動力降下中」に、高度50 m付近で航法カメラ(CAM-PX)側のスラスター・ノズルが破断した模様。写真は19時20分(JST)に「SLIM」搭載の航法カメラ(CAM-PX)が撮影した「落下するノズル」と思われる物体。燃焼室とノズルの境で折れているようだ。この6分前の19時14分撮影の画像には写っていない。

図9:(JAXA/三菱重工/三菱電機)「SLIM」のメイン・スラスター。推力500 N級メイン・スラスター/OME 2本が取付けられている。
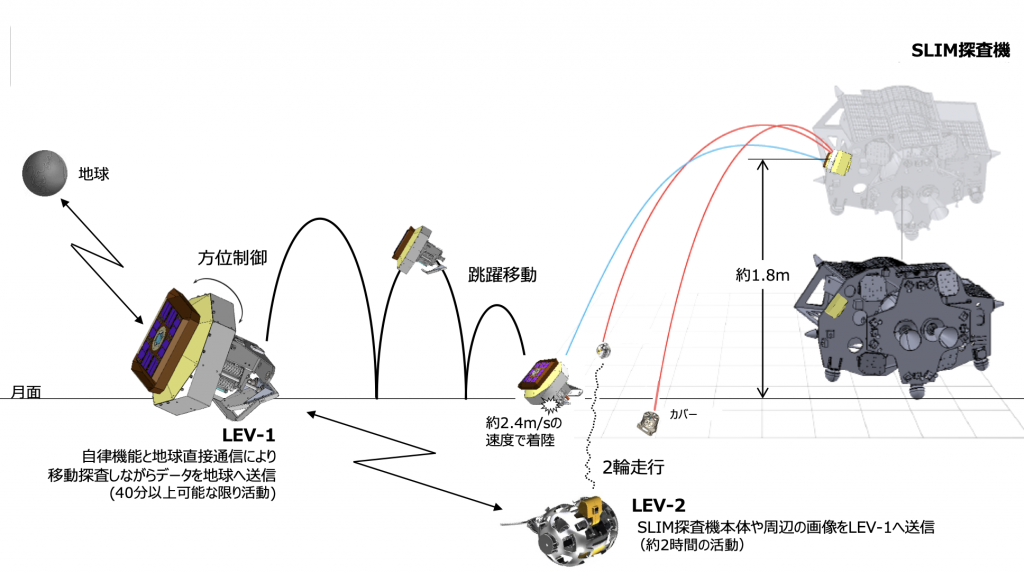
図10:(JAXA、東京農工大学、中央大学)「SLIM」が自由落下に入ると小型プローブ「LEV-1」と「LEV-2」が放出される。「LEV-1」は地球との直接通信機能をを備え自立機能で跳躍して移動しながら探査をしデータを地球に送る、バッテリーで数時間稼働できる。「LEV-2」はバッテリー電力で走行しながら搭載カメラで周辺を撮影、「LEV-1」に送信、これを経由して地球に送る、稼働時間は2時間。

図11:(JAXA/タカラトミー/ソニー/同志社大学)月面探査小型プローブ「LEV-2」こと「SORA-Q」の写真。直径約8 cm、重さ250 grの球形ロボットである。

図12:(JAXA/タカラトミー/ソニー/同志社大学)着地すると球体が左右に割れ、中からカメラが現れる(黄色の部分)。カメラは両面にあり走行する方向の前後を撮影できる。左右の球体部分が車輪となって動く。写真は車輪を同時に動かすバタフライ走行時を示す。左右の車輪を別々に動かしてクロール走行もできる。
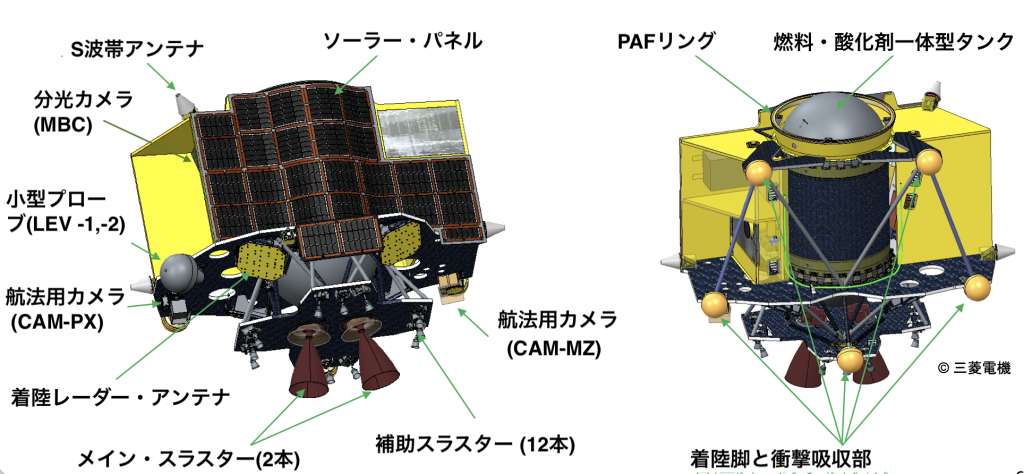
図13:(JAXA/三菱電機)「SLIM」探査機の外観。大きさは高さ2.4 m、縦1.7 m、横2.7 m、質量は推進用燃料無しで200 kg、燃料搭載時では700~730 kg、燃料・酸化剤一体型タンクで軽量化を図り、しかもこれが探査機の主構造を兼ねている。
「ソーラーパネル」はシャープ製、化合物3接合型太陽電池モジュール、薄いフイルムで軽量・曲面にできる。一枚のシートで20.9 Watt出力、26シート繋ぎ合わせ合計540 Wattの出力を得る。
「SLIM」の推進系は、下面の「推進系パネル/RCS=Reaction Control Panel」に取付けてある。RCSパネルの四方には姿勢制御用の補助スラスター/THR「22N スラスター」(推力22 N/ニュートン)が合計12本、中央には推力500 N級のメイン・スラスター/OME 2本が取付けられている。THRはIHIエアロスペース製、三菱重工が燃料/酸化剤タンクとOMEを製造、配管を含めた推進系全体を三菱電機が担当している。
左図の左黄色パネルにある「マルチバンド分光カメラ(MBC)」は、750nmから1,650nmの波長帯を10バンドに分け、10mほどの距離で0.13cm/pixelの高解像度で観測できるカメラ。MBCは着地後周辺の岩石とレゴリス(月表面の土壌)を観測する。観測波長は月の主要鉱物である輝石、カンラン石、斜長石などを識別するために選定してある。
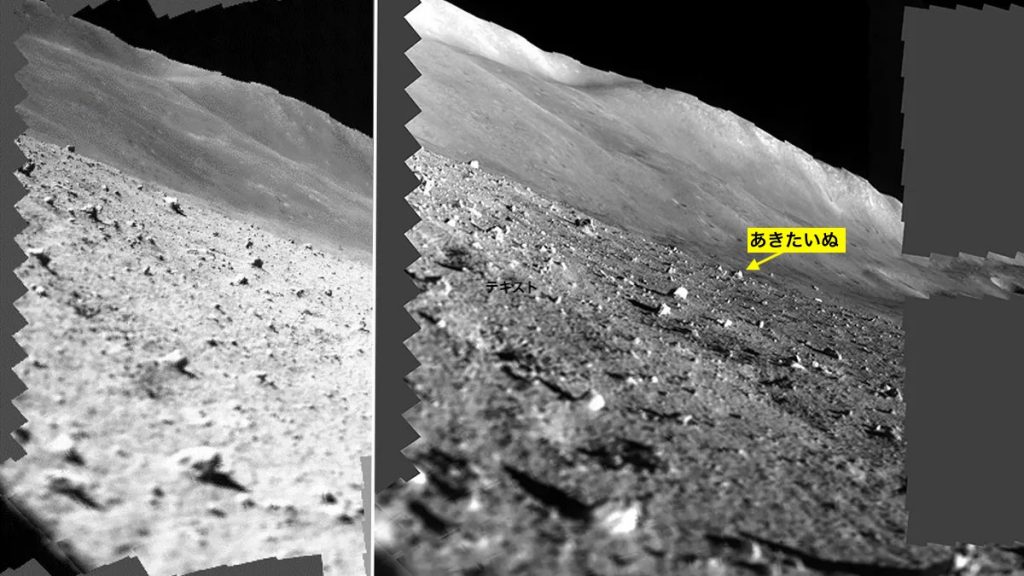
図14:(JAXA) 月の南極にあるクレーター「SHIOLI」(栞/しおり)近くの斜面に着地した月探査機「SLIM」が搭載する分光カメラ(MBC=Multiband Spectroscopic Camera)で撮影したモザイク写真。左は19日着地した日に撮影、右は太陽光発電で電力が回復した10日後の写真。いずれも同じ場所を写したもの。太陽の位置が東から西になり影の向きが変わっている。
「SLIM」はメインスラスターの故障で逆さで着地したため、ソーラーパネルが西向きとなり太陽光を十分に受けられない状況になった。このため最初は短時間しか撮影できなかった。しかし10日後太陽の位置が変わり充分光が当たるようになると、電力が回復し上手く撮影できるようになった。
搭載のMBCカメラは、太陽光を反射する岩石に光を分光分析できる。
月では、地球の14.5日で夜昼が入れ替わるので、現在は夜で2月15日に夜が明ける。「SLIM」はその間眠る訳だが夜間の温度は-208度Cにもなり、それに「SLIM」搭載の機器が耐えられるかわからない。
いずれにしても着地後10日間で大量のデータを収集できたので、これから岩石の化学組成
を調べ、月の生成の過程を研究することになる。
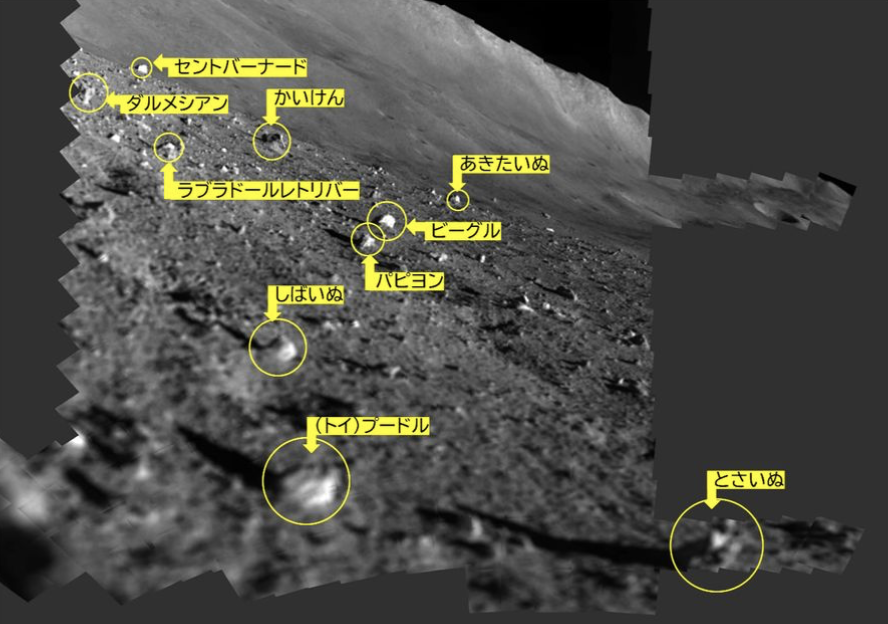
図15:(JAXA, Ritsumeikann Univ. Univ. of Aizu)前図の写真にある大きな岩石にはこのように犬の名前が付けれた。

図16:(JAXA, Ritsumeikann Univ. Univ. of Aizu)前図の右上にある岩石「あきたいぬ」を18 m離れた場所にいる「SLIM」の分光カメラ(MBC) /近赤外線で撮影した写真。「あきたいぬ」は幅63 cmの大きさ。
終わりに
冒頭に述べたように、JAXA月探査機「SLIM」は2024年1月20日に月に着陸した。着地寸前にメイン・スラスターの1つが故障、着地姿勢が予定通りにならなかったが、最大の目標「ピンポイント着地」では予定地点の100 m以内に着地し成功した。そして着地後10日間で大量のデータを収集できたので、これから岩石の化学組成を調べ、月の生成の過程を研究することになる。2月15日の月の夜明けで「SLIM」が再稼働に成功すればデータ収集がさらに進むが、それを待つまでもなく当初の目的は達成された、と言って良い。
―以上―
本稿作成の参考にした主な記事は次のとおり。
- JAXA 2022-3-15記者説明会“小型月着陸実証木(SLIM)プロジェクトの概要”
- JAXA Technology “高精度着陸と軽量探査機”
- JAXA 、タカラトミー、ソニー・グループ、同志社大学、2024-6-1“変形型月面ロボットによる小型月面着陸実証機(SLIM)の撮影およびデータ送信に成功”
- Space.com. February 4, 2024 “Japan’s SLIM moon lander snaps final photos before going dormant suaring lunaranight” by Andrew Jones
- Space.com. February 5, 2024 “SLIM lander’s precise ‘moon sniper’ tech will lend itself to future lunar missions” by Mariel Borwitz
- Tokyoexpress 2020-06-17 “月面探査車の開発進む「ロッキード・マーチンとGM」、「J A X Aとトヨタ」
- Tokyoexpress 2024-1-20 “JAXA、X線分光撮像衛星[XRISM(クリズム)]活動を開始“