2018-09-17(平成30年) 松尾芳郎
2018-09-18 改訂(誤字訂正と”終わりに”に追加記述)
初めに
本稿はエビエーションウイーク・ネットワーク版2018-09-07にあるグラハム・ワーウイック(Graham Warwick)氏の記事“F-35開発の経験を次期戦闘機開発にどのように生かすか”を中心にして、F-35の解説を試みた。
F-35は2006年12月に初飛行、これまでに320機以上が生産されている。米空軍、海軍、海兵隊では2037年までに合計2,663機を導入し、2070年まで使う予定にしている。この他に日本、英国を含む10カ国から計690機の注文があり、さらに増える見込み。
米国防総省がF-35の「開発」/ [SDD=System Development and Demonstration(システム開発と実証)]をロッキード・マーチン社に開発期間10年、費用190億ドルで発注したのは2001年であった。それが3機種同時開発に変更になったため、期間は18年に伸び、開発費は340億ドル(3兆7,400億円)に膨らんだ。開発に関わる試験飛行は2018年4月に完了し、これからは「開発/SDD」で積み残した不具合箇所の改善に取組むことになる。
主契約はロッキード・マーチンだが、主な協力企業にノースロップ・グラマン、プラット&ホイットニー、BAEシステムズ、の各社が名を連ねている。
- F-35プログラムで設定した基本的な目標の追求が今後も続く
- 試験飛行時間は当初の計画のほぼ2倍になった
- ソフトの問題点解決には最初からのやり直しが必要である
F-35プログラムがこのように巨大化したのは3機種同時開発に変更されたためである。すなわち空軍用F-35A、海兵隊用F-35B、海軍用F-35C、それぞれ要件の異なる機種を、共通性を維持しながら開発することになったことによる。これは当時米ロ対立の冷戦終了後の国防予算削減を受ける中で、予算を極力抑えながら、差し迫った3軍の戦闘機更新要求に応えるためであった。

図1:(Lockheed Martin) 海兵隊用「短距離離陸垂直着陸(STOVL)型F-35B。ミサイルなどの兵装は、胴体内のウエポンベイの他に翼下面の懸架装置/hard-pointに取付けられる。
F-35系列の3機種
空軍用通常離着陸型F-35A、海兵隊用短距離離陸垂直着陸(STOVL)型F-35B、海軍用空母艦載機型F-35C、はいずれも「開発/SDD」が完了、配備が始まっている。しかし去る2018年6月に行われたAIAA主催の会議(Atlanta, Georgia) でF-35プログラム責任者が“更なる改良(deep dive)”を2019年2月から開始する、と述べた。
F-35はF-16に比べ長さで60 cmしか大きくないが、中身はびっしり詰まっていて、空虚重量は13 ton以上でF-16の2倍になる。F-35BとF-35CはF-35Aよりもさらに重い。F-35Aの最大離陸重量は32 ton近くになり、最新型のF-16戦闘機の約2倍。以下に3機種の比較を示す。
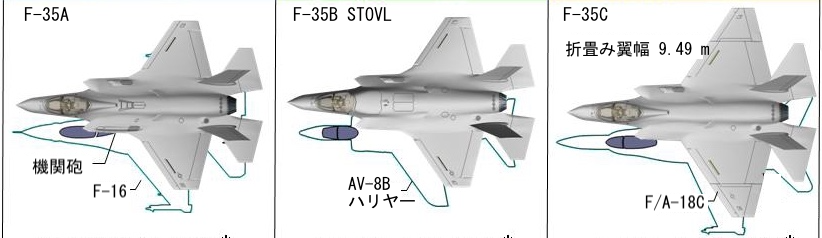
図2:(US Department of Defense)F-35 の3機種と対応する現用機の“平面形”の比較図。F-35は現用機とあまり差のない大きさだが、中身は全く違う。

図2A;( Wikipedia) 3機種の編隊飛行。左はF-35Cで翼面積が大きい、中はF-35B、右はF-35Aで翼面積は変わらない。

図3:(Wikipedia) F-35 3機種の諸元比較表。
重量の問題
「開発/SSD」の契約が結ばれた後、最初に取り組んだのが重量予測。ロッキードは従来から最初に重量の予測から始め(parametric modeling)、これを基に設計を進める方法を採っているが、F-35の場合にもこれを適用した。設計が進むに連れ細部の重量予測値が積算される。
こうして出来上がった重量予測は最初の予想より4,800 lbsも重くなった。最も差が大きかったのは重量に厳しいF-35Bだった。当時F-35B計画のエンジニアで、後にその主任設計技師を務め、今はF-35顧客プログラム担当主席のアーサー・シェリダン(Arthur Sheridan)氏は、2003年末に「F-35Bは、重量超過のため短距離離陸・垂直着陸(STOVL)が出来そうもない」と語っている。
理由は、これまでの機体設計では重量予測モデル(parametric modeling) が最適設計の基本になっていたからである。F-35は基本的に異なる構造のため、最適化が困難であった。胴体内蔵型のウエポンベイ、組立て作業の効率化のためのクイック・メイト結合方式(quick-mate assembly joints)、などのため、構造の荷重伝達(structural Load paths)の最適化が難しかった。加えて容積に余裕がなく、特にリフトファンやエンジンの周辺にはワイヤリング、配管、ダクト類が錯綜し、取付けが極めて困難であった。

図4:(Lockheed Martin) F-35は内部部品の収納スペースがタイトなため、あちこちに膨らみを設けて対処している。
2004年に共同開発国からの参加を含め550名からなる「F-35B重量削減チーム(SWAT=STOVL Weight Attack Team)」が編成され、機体の再設計に取り組み、7ヶ月間作業が行われた。この結果600ヶ所以上で設計が見直され、2,600 lbsの重量が削減された、またエンジン推力は700 lbs増加した。さらに要件を見直した結果745 lbsの追加の削減が出来た。
これらの改善はF-35Bだけでなく他機種にも適用された。これで、主翼・胴体結合部(cross-sectional area) の部材は強化され、構造荷重伝達(structural load paths) が改善され、内部収納容積が増えた。しかし超音速性能の低下と云う代償を払うことになる。
クイック・メイト接合方式(quick-mate assembly joints) は廃され、普通のジョイント方式に戻された。この結果重量は減ったが、最終組立時間がほぼ2倍に増えた。「重量削減チーム/SWAT」のお陰でSTOVL F-35Bは生き返り、他の2機種は性能が向上した。
重量削減だけでは十分ではない。SWATの活躍の後ロッキードでは、生産ラインから出荷する機体の重量増加(weight-growth)を3 % 以内にすることを目標にした。従来の業界の常識では6-8 %の増加が普通とされている。この規律は厳しく守られ、3機種とも契約重量から3 %以下の重量増加範囲内で顧客に引き渡されている。(前記シェリダン氏談)

図5:(Lockheed martin) 空母甲板に着艦したF-35C。尾部のフックが制動用ワイヤーを引っ掛け機体を停止させる。主車輪とフックの間隔が短いためワイヤーの捕捉に問題が生じた。
F-35B リフトファン
重量削減には続きがある。初期のF-35Bでは、両主翼を縱通するバルクヘッド(隔壁) がアルミ合金製だったため、耐久試験でクラックが生じた。F-35AおよびF-35Cは、これがチタン合金製のため問題はなかった。2011年にF-35B開発の可否が問題なった原因の一つがこれだった。国防総省は、F-35Bについて、これを含む大きな問題を2年以内に解決すると云う条件付きで開発続行を認めた。いわば“保護観察処分”である。
F-35Bの最大の問題点は、STOVL推進装置の信頼性不足で、特に胴体上の補助空気取入れドアの振動、クラッチの過熱、ファン駆動軸の伸び、および両翼下面にあるロール・ポスト・アクチュエーターの過熱、などに問題があった。改良が行われ、1年後には“保護観察”が解除された。
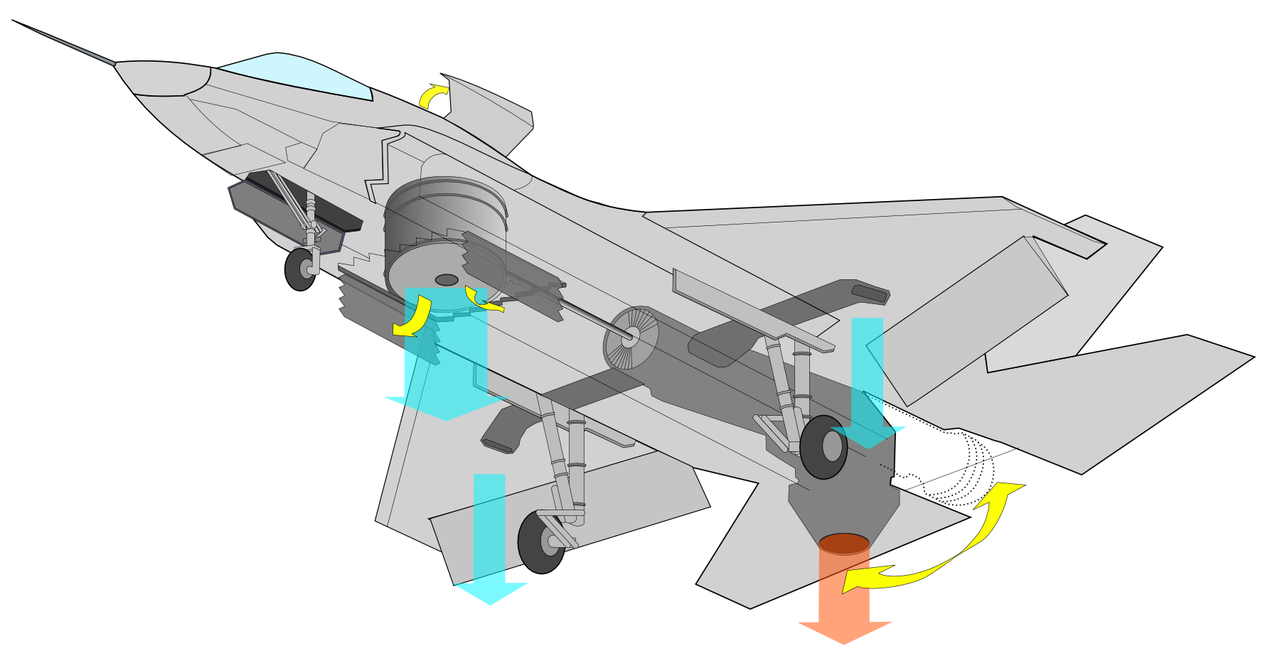
図6:(Wikipedia) F-35BのSTOVL機構。胴体前部から順に、リフトファン、駆動シャフト、PW F135エンジン、推力偏向(vectoring) ノズルがある。両翼下面にはエンジン・コンプレッサーの抽気で作動するロール・ポストがある。また胴体の背にはリフトファン用ドアとエンジン吸気用補助ドアが、また胴体下面にはリフトファン排気ドアが付いている。

図7:(Wikipedia / Lockheed Martin) F-35Bではリフト・システムのドアに問題があった。写真は着艦体勢に入ったF-35B。胴体背のリフトファン用ドアとその後ろのエンジン吸気用補助ドアが開いている。また両翼下面にはロール・ポストが見える。後部ではエンジン推力偏向ノズルが下向きになっている。
テストパイロットのダン・レビン(Dan Levin)氏によると、現在のF-35Bは、重要な2つのパラメーターで目標を上回っている、と云う。すなわち、短距離離陸性能では20 %、垂直着陸では7 %、それぞれ設定された性能値を上回っている。
「重量削減チーム/SWAT」の活動で共通性が失われた箇所もある。F-35Bの重量削減で胴体内のウエポンベイのミサイル等の兵装収容能力が半減した点である。しかし、ベイは異なるタイプになったが、懸架装置、発射装置、収納管理システム、および外部翼下面懸架装置は3機種とも共通である。
ウエポンベイ/兵装
F-35には胴体下部にウエポンベイが2つあり、両翼には翼端を含め6箇所にハードポイントがある。翼端ハードポイントには空対空短射程ミサイルAIM-9X、英空軍のASRAAMのみを搭載する。ウエポンベイには、AIM-120 AMRAAM長射程空対空ミサイル、AGM-158 JASSM対地対艦巡航ミサイル、および誘導爆弾を搭載する。日英共同開発の長射程対空ミサイル“メテオール”も装備可能になる予定。翼下面のハードポイントには、各種ミサイル、爆弾、追加燃料タンクが搭載できる。
各ウエポンベイには、F-35AおよびF-35Cの場合、合計910 kg (2,000 lbs)の兵装を搭載できる。しかしF-35B STOVL機ではその半分しか搭載できない。これは既述の重量削減で、ウエポンベイが設計変更になったためである。この変更は、ミサイルなどの収納だけでなく、他のシステム装備品の収納にも影響があり、両翼を結ぶ縱通バルクヘッドも絡む場所なので、かなりの大仕事になった。
F-35Aでは4銃身バレル型25 mm機関砲GAU-22/A を胴体左側に搭載している。しかしF-35BとF-35Cでは機体には内蔵せず、必要に応じ胴体下のハードポイントにGAU-22/A機関砲と弾丸220発を組み込んだポッドを懸架する。
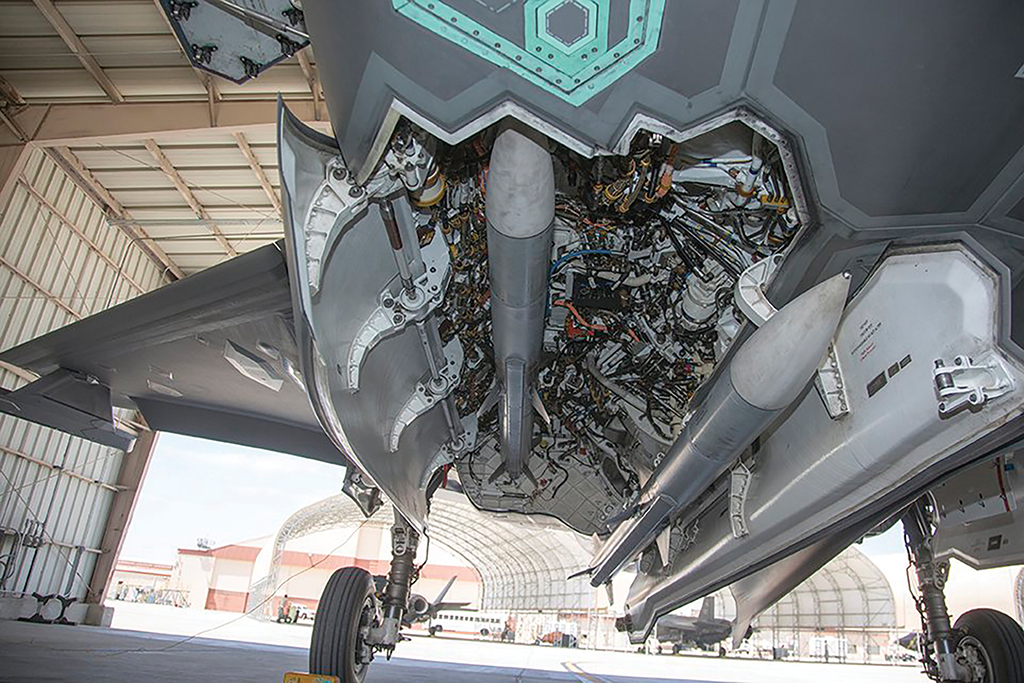
図8:(Lockheed Martin) ドアを開いたウエポンベイ。
ヘルメット搭載型デイスプレイ・システム(HMDS)
重量削減で、コクピットの表示装置“ヘッドアップ・デイスプレイ(HUD=headup display)”を廃し軽量化し、代わりに“ヘルメット搭載型デイスプレイ・システム(HMDS= helmet-mounted display system)”を採用した。これでHMDSが“主飛行表示装置/プライマリー・フライト・デイスプレイ(PFD =primary flight display)”となった。
F-35の”HMDS” は、エルビット・システムス(Elbit Systems)とロックウエル・コリンズ(Rockwell Collins)の合弁企業VSI (Vision System International) 社が開発製造している。これは従来のHMDSが持つ機能だけでなく、F-35の先進アビオニクスの性能を活用して昼夜を問わず全方位のフライト情報、戦闘情報、それにセンサー情報を、重要度に応じ順位を付けして映像化しパイロットに示す“第3世代( Generation III ) 型HMDSである。2014年7月から引き渡しが始まっている。
しかし“ヘルメット搭載型デイスプレイ(HMDS)”技術には未だ改良の余地が残っている。
夜間視力の精度(night-vision acuity)、目標の追尾能力(tracking alignment)、映像表示の待ち時間(imagery latency)、表示シンボルの不安定(symbology jitter)、および“グリーン・グロー(green glow)”と呼ばれる視野全体が緑色化する現象、などがそれである。改良が進められているが、これでヘルメットが重くなると別の問題、つまり脱出の際にパイロットの体重が軽い場合、首が損傷する恐れが生じる。対策として軽い”第III世代ヘルメット/ Generation III Hemet”への換装促進とMk16E 脱出座席(Mk16E ejection seat) に軽量パイロット用スイッチの設置が進んでいる。この脱出座席は時速600 kt (約1,100 km/hr) で安全に座席を射出できる。

図9:(Rockwell Collins) “ヘルメット搭載型デイスプレイ(HMDS)” には、機体側のセンサー情報を統合し優先順位化をする“Sensor Fusion”システム、視野角40度カメラ、昼夜両用カメラ、などが内蔵されている。情報はバイザーの内面に映し出される。

図10:(Rockwell Collins) “ヘルメット搭載型デイスプレイ(HMDS)”は、従来の表示盤“プライマリー・デイスプレイ”に代わるもので、昼夜に関わらず胴体の下や後方を含む機体の全周囲の目標をバイザーに映像化して表示する。しかも自機の飛行情報(速度、方位、高度など)やセンサー情報の表示も妨げられない。
飛行制御方式
F-35は、量産機としては初めて”飛行制御方式(flight control low)”に“非線形ダイナミック・インバージョン( NDI=nonlinear dynamic inversion) と呼ぶ方式を採用した。一般の航空機では、飛行制御には複数の線形コントローラー(linear controllers, or gain schedules)を用い、飛行包絡線で囲まれた範囲の飛行を制御している。
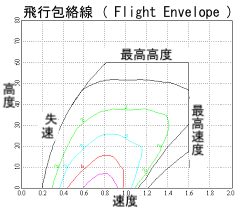
図11:(Wikipedia) 飛行包絡線(flight envelope) の説明。飛行機が飛行できる速度、高度の範囲を示す図で、これを超えると失速したり過荷重となり破損し、飛行できなくなる。つまり“包絡線”の内側で飛行することで安全が保たれる。“飛行包絡線”は機種毎に異なり、設計段階で包絡線の予測が決まり、これを試験飛行で確認することになる。操縦系統にフライ・バイ・ワイヤ方式を使う機体では、ソフトに保護装置を組込み、包絡線から逸脱しないようにしている。
F-35の場合、3機種とも共通の飛行制御方式として“非線形”方式を採用し、“高迎え角飛行(AOA=high-angle-of-attack)”から“短距離離陸垂直着陸(STOVL)への遷移飛行”までの範囲を、空力的制御とエンジン推力制御を合わせて行っている。このような広い範囲の飛行包絡線をカバーする飛行制御方式を開発するには、極めて複雑で多くの時間を要した。
“F-35飛行制御設計先任マネジャー(Senior manager for F-35 control-law design)”のジェフ・ハリス(Jeff Harris) 氏の話;—「3機種とも基本的な空力特性が異なっているが、同じ飛行制御方式で飛行包絡線上のレベル1飛行性能(Level 1 flying qualities) まで制御したいと考えていた。つまり3機種に対し1つの“飛行プログラム(OFP=operational flight program)”を適用し、その中に必要な全てを組み込む、方法である。」
F-35テストパイロットダン・カニン(Dan Canin)氏は次のように述べている;—
「各機種に搭載する“空気力学モデル”に“非線形飛行制御方式( NDI )”を使っている。パイロットの操作に応じて、この“モデル”が必要な加速度を計算、これを操縦舵面への指令に変換する。この“モデル”は2つのことをする、すなわち、“飛行プログラム(OFP)” の次の80分の1秒後での、舵面の有効角度の予測とピッチ・ロール・ヨーの3軸回りの加速度の予測を行い、そして現在の舵面位置を維持するのに必要なパワーの計算をすること、である。」
前述のハリス氏は次のように述べている;—「“非線形飛行制御方式( NDI )”は、操縦舵面が、制限を超える速度で動いたり、制限位置を超えそうになったり、または故障、損傷した場合に、直ぐに他の代替措置が採れるようになっている。」
初期のF-35の飛行試験では“非線形方式( NDI )” にエラーが見付かったが、中でもF-35B でSTOVL用ドアを開いた時に機体の方向安定性が失われると云う大きな問題があった。
3機種共通の問題としては、他の戦闘機開発でも経験した、遷音速飛行中に主翼が突然失速しまた回復という現象である。遷音速飛行では機体表面に部分的なショック(衝撃波)が生じ、あちこちに移動するが、これを予測しモデル化することは難しく、“非線形飛行制御方式( NDI ) ” に後からソフトを追加して何とか解決した。
前述のテストパイロット、カニン氏は次のように言っている;—「第四世代戦闘機と同じ“機動性( maneuverability)”を持つことがF-35に課せられた要件の一つだったが、これは満足した。すなわち通常飛行から“高迎え角飛行(AOA=high-angle-of-attack)”( alpha/アルファとも云う)まで、さらに失速(stall) 後の回復操作を含み、パイロットは必要最小限の操作で対処できる。」

図12:(Wikipedia) 失速(stallまたはnormal stall)の説明。翼の迎え角(AOA=angle of attack)が大きくなると翼の上面を流れる空気流が剥がれて翼の揚力が失われる。迎え角の限界は翼型や高揚力装置、レイノルズ数などで変わるが、単純翼では15度程度である。水平飛行でも速度が落ちると空気流が剥がれ失速する。失速から回復するには、機首を下げ、エンジン出力を増やし速度を上げ、翼を流れる空気流を正常に戻せば良い。
カニン氏はまた「“高迎え角( high AOA )”飛行を“空気力学モデル”に組込むのは、エラーの修正のため入力を大きくする必要があるなど、かなり難しかった。“高迎え角”飛行の際必要な操作は水平安定板を動かし“ヨー”と“ピッチ”を保持することである。」「“高迎え角”飛行は、50度の制限値まで機首を上げ、そして回復すると云う操作を自分が行い、各機種とも100回ずつ実施、いずれも極めて安定した結果を得た。」と述べている。
F-35はF-16も同じだが、“デイープ・ストール(deep stall) ” に入り得るが、その場合でもパイロットの操作を必要とせず自動的に回復する。これはコントロール・システムが失速を検知すると“機首上げ”を抑えるよう働くためである。またF-16では背面飛行時でも“デイープ・ストール”が起きるが、F-35ではその傾向はない。
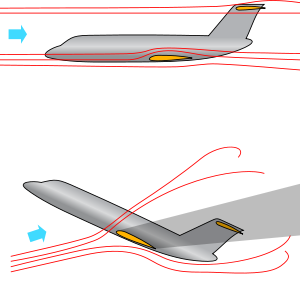
図13:(Wikipedia) “deep stall”とは、主翼の“失速”で生じた乱流が水平尾翼を呑み込む現象で”T“ 字型尾翼で尾部エンジンの機体で生じ易い。この状態になると水平尾翼や昇降舵が効かなくなり、失速の回復が困難になる。
パワー・バイ・ワイヤとF-35C特有の問題
F-35はパワー・バイ・ワイヤ(power-by-wire)式フライト・コントロールを採用した最初の戦闘機である。操縦舵面の操作は、電気信号で各舵面の作動筒/エレクトロ・ハイドロスタテイック・アクチュエーター(EHA=electro-hydrostatic actuators)/電動油圧アクチュエーターを作動させ行われる。
操縦舵面は、昔は人力でケーブルを通して動かしていた。飛行機が高速化、大型化するに従い舵面に加わる力が大きくなり人力での操作は難しくなった。そこで油圧アクチュエーターが登場、油圧ポンプやバルブを動かし、全機に張り巡らした配管でアクチュエーターを操作するようになった。しかし重量が嵩むのと反応速度が遅い問題があり、最新型の機体にはEHAが採用されつつある。
F-35の操縦系統は当初同じパワー・バイ・ワイヤ・システムにする予定だったが、3機種それぞれ特有の空力特性があるため、個別のシステムになった。特に艦載用F-35Cではエルロン(両翼の補助翼)に必要な操舵力が大きい。
F-35Cは空母着艦のため、他機種と異なる点がある。すなわち着艦速度を遅くするため主翼と尾翼を大きくし、エルロンのロール・コントロール能力を高め、ランデイングギアを強化し、捕捉ケーブルを掴むテイルフックを取付けてある。
テイルフックの最初の試験では、甲板に設置された捕捉ケーブル(arrestor cable) に引っ掛け損ねた。着艦時にはまず車輪がケーブルを踏むが、これでケーブルが振動し、丁度ケーブルが甲板面に下がった時にフックが通過したためである。
3機種の同時開発に際し基本としたのは、共通性、重量、ステルス性、の3つであった。当時全体設計を指導し今はF-35エンジニアリング・オフィスの先任マネジャーを務めるマーク・カウント(Mark Counts)氏は「胴体の長さを短くすることが重量節約の要点である。1 ft (30.5 cm) 当たりの重量は600-700 lbs (約300 kg) になる」と話している。F-35B STOVL機の場合、リフトファンを操縦席の直ぐ後ろに置くためエンジンを他機種より後方に配置した。英国で開発され、米国でライセンス生産した垂直離発着戦闘機AV-8Bハリヤー(Harrier)のエンジン位置はほぼ機体の中央になっている。
さてテイルフックだが、胴体の長さを短くし同時にステルス性を確保するため、収納部分にも工夫した。この結果、主車輪の位置からテイルフックまでの距離を2.17 m に縮めている。現用の艦載機F/A-18E/Fでは5.55 m、これに比べると著しく短い。従ってタイヤがワイヤーを踏み付けてから元の高さに戻るまでの時間が不足し、前述の問題につながった。対策としてフックを押し下げるダンパーの力を強くし、同時にフックの取付け部分を強化して解決した。
F-35Cの問題点の2つ目は、カタパルト発艦時に生じた強い上下振動である。カタパルトに機体を取付けるには、カタパルトのシャトル(shuttle) と呼ぶ“走行金具”にノーズギア(前車輪)を固定する。その際、ノーズギア支柱(strut)を押し下げてエネルギーを蓄え、カタパルトから離れるときに機首が上がり上昇姿勢になるようにする。従って発艦の際の上下振動は在来機でも存在していた。F-35Cではこれが過大になったことが問題になったのである。解決策として支柱の圧縮圧を減らし、パイロットはベルトを強く締めること、の2つが採られた。
F-35で空母着艦のため進入する際は”IDLC=integrated direct lift control”、すなわち“統合直接揚力コントロール”と呼ぶシステムを使う。”IDLC” は、パイロットはステイックの操作で進入経路(glideslope) を保持するが、その入力に応じて速やかに主翼後縁フラップとエルロンを動かし揚力を調整するシステムである。”IDLC”は“デルタ・フライトパス・モード(Delta Flight Path mode)”の一部分になっている。”デルタ・フライトパス・モード“は、空母着艦支援システムで、空母の速度、風速・風向、自機の速度を使いコンピューター計算で、飛行機を自動的に進入経路(glideslope) に乗せ、着艦まで誘導するシステムである。これは画期的な空母着艦用進入システムで、このお陰で空母適用試験が順調に推移した。
F-35の「開発(SDD)」では、予想をかなり上回る試験飛行が必要であった。最後の「開発(SDD)」試験飛行は4月に行われ9,235回目となった。機種選定の際の見積もりでは、他社との関係もあり、およそ5,000回と申請していたのでその倍近くにもなった。
ロッキード社の「F-35試験・立証」担当副社長のJ. D. マクファーレン(J. D. McFarlen) 氏は次のように述べている;—「試験飛行はその後1,500回追加し7,700回に修正された。F-35Aでは予定通り1,700回で終わったが、F-35Bでは、STOVL用ドアの問題があり2,500回となった。F-35Cでは、テイルフック再設計の問題があったがあまり増えなかった。」
「しかしミッション・システム(mission system) 、つまり“戦闘能力に関わるソフトシステム”の試験には1,200回以上の追加試験飛行が必要になった。これはソフトの一部を修正しても、他への影響がないこと確めるため、全体の再試験が必要になったためである。」
ソフトウエアは、予定ではブロック毎に開発、追加する予定だったが、個別の機能だけでなく各ブロックの重複部分の安定性まで検証する必要が生じたためである。
前記マクファーレン氏の談話;—「米空軍が2016年8月にF-35A の限定的な戦闘能力として認定したソフト”Block 3i ” は、1年前にF-35B 用の戦闘ソフトとして海兵隊が認可した“Block 2B “ と同じで、関連の装備品が異なるだけである。にも関わらず空軍が500回もの試験飛行を追加したのは納得しがたい。」
マクファーレン氏は続けて「“開発(SDD)”が要求する“完全な戦闘能力”に対応するソフトは”Block 3F ” である。”Block 3F ” は、各種センサーの統合機能が故障・不安定化した場合、即座に対応・修復できるシステムで、完成までに30回以上書き直しが行われた。センサーの統合機能を完全に維持するには予想以上の努力が必要だった。」と語っている。
この“ミッション・システム”は、F-35装備の各種センサーからの情報だけでなく、次に述べる機外から伝えられる情報と統合し分担する機能を持つことが大切である。すなわち、多目標を追跡するレーダー情報、敵電波から発射位置を特定する電子戦情報、敵ミサイル攻撃を探知・警告するレーダー情報、赤外線探知・追尾情報、電子・光学目標捕捉センサーからの情報、それに友軍からの各種データを瞬時に共有するデータ・リンクなどを受信、自機のシステムと統合し、判断するシステムである。
従来の戦闘システムでは、多くのシステムからのデータを集め、各センサーからの最適値を平準化して目標を追尾するという方法が採られてきた。F-35の“ミッション・システム”では、各センサーからの情報を、必要なもの、不要なもの、に選別して統合化する“closed-loop sensor fusion” 方式になっている。すなわち各センサーの測定値の判定をして統合している。
測定値を判定し統合化するやり方は、目標の追跡精度が向上するだけでなく、自機の全周の状況把握能力が高くなる。センサー情報を自動的に判定する能力により、複数の目標追跡に順位を付けられるようになった。複数の目標が接近してきた時に、パイロットは脅威の順位に従って対処が可能になる。パイロットのデイスプレイには、複数の目標が脅威度を付して表示されるので、容易に対処を決断できる。
エンジン
ロッキードの担当副社長マクファーレン氏はエンジンに関し「P&W F135エンジンは非常に良い。開発途中で数件の問題が生じたが、いずれも対策が完了した」と述べている。すなわち
- 2013年2月の定期検査でタービン・ブレードにクラックを発見。原因は高温で規定以上の長時間運転を続けたためと判明。
- 2014年5月には、A&Pアロイ社が供給するチタン素材に規格を満たしていないものを発見、サプライヤーを変更した。
- 2014年7月には離陸前の試運転で3段ファンのブレード・デイスクが破断し、燃料タンク火災が発生した。これで一時的に試験飛行が中断された。3週間前に高いgが加わる機動をしたためエンジンが湾曲し、ファン・デイスクとファン・ステーターの間で強いシール摩耗が起こった。摩擦熱は1,000度Cにもなりデイスクの耐熱限界である540度Cを超えた。ファンはデイスクとブレードが一体の構造のため、ブレードが高温で破断したのが原因と判明した。この件は大きな問題となり、代替として開発中だったGE / RR共同のF136エンジンに換装する案が浮上した。しかし、当面の対策として高g機動の禁止が行われ、恒久策としてシール部分の改良が進み、問題が解消したので継続使用が決定された。
F135は、F-22 ラプター戦闘機に搭載されているF119エンジンを基本に、新設計のファンと低圧タービンを組入れたアフトバーナー付きターボファンで、次の3型式がある;—
F135-PW-100 :空軍用F-35Aに使用
F135-PW-400 :海軍用F-35Cに使用
F135-PW-600 :海兵隊用F-35B STOVL機に使用
F135-PW-100が基本形式で、全長5.59 m、最大直径1.17 m、ファン入口直径1.09 m、重量1.7 ton。ファン3段、高圧コンプレッサー6段、高圧タービン1段、低圧タービン2段の構成。アフトバーナー時の最大推力43,000 lbs (191 kN)、全圧力比28:1。推力/重量比はドライ時7.47 : 1、A/B時11.47 : 1である。
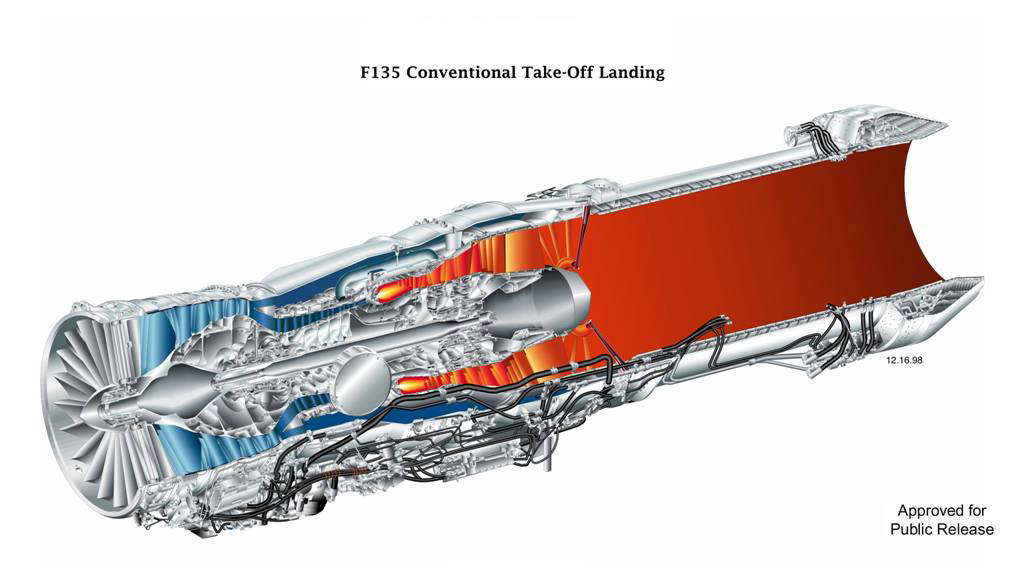
図14:(Pratt & Whitney) 空軍用F-35A用のF135-PW-100型と海軍用F-35C用のF135^PW-400型エンジンはほとんど同じで、後者には塩害処理が施されている点が異なる。
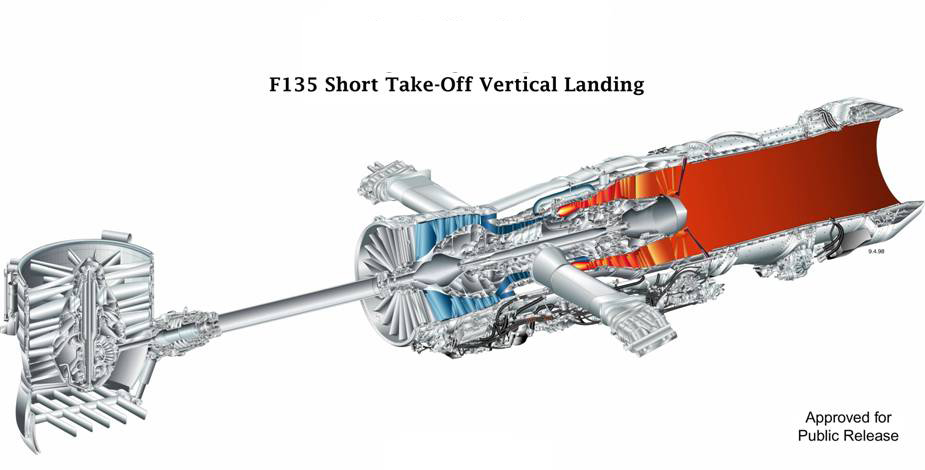
図15:(Pratt & Whitney) 海兵隊用F135-PW-600型の見取り図。垂直着陸時には推力偏向型排気ノズルと前方にあるリフトファン2段でそれぞれ下向きに全推力の46 %ずつを噴出、両翼下面のロール・ポストから残りの8 %を吹き出し、機体を静かに降下させる。
終わりに
前F-35プログラム主席、今年3月にロッキードのスカンクワークス(Skunk Works) 担当副社長兼部長になったジェフ・バビオン(Jeff Babione)氏は次のように話している;—
「開発(SDD)」完了に伴い、プログラムは次の更なる近代化に移っている。次の10年間に予定している近代化改修は約60項目で費用110億ドルを見込む、内容は“機動性の向上( more agile) ”、ソフトウエアの近代化とハードウエアの性能改善を6ヶ月毎に段階的に実施する。」続けて「F-35の将来予測、今後の改良計画はどうなるか不明。改良にまた20年も費やし第6世代の戦闘機を目指すことは出来ない。今は開発を終えたばかり、これから次の改良を費用を抑えてスタートするところだ」。
戦闘機の開発には、長期間と膨大な投資が必要で、英国の新戦闘機“テンペスト”計画でも述べたように正に国家的事業である。我国ではF-2およびF-15の代替として新戦闘機F-3の構想が出て久しいが、いよいよ決断の時期が迫ってきた。今では純国産でなく共同開発案が有力のようだが、相手として、英国の“テンペスト”に参加する案、ロッキード・マーチン提案の“F-22を基に日本製エンジンを装着する案(日経報道による) が語られている。何れにしても政府が本腰を入れて決定し、政権が変わろうとも10年以上の開発期間をぶれずに推進しなければ実現は難しい。
—以上—
本稿作成の参考にした主な記事は次の通り。
Aviation Week Sept 7, 2018 “How F-35 Experience could reduce Hurdles to Developig Fighters” by Graham Warwick
Lockheed Martin F-35 Helmet “Unprecedented Situational Awarness”
Wikipedia “Lockheed Martin F-35 Lightning II”
Wikipedia “Stall (Fluid mechanics)”
Defence 30 August 2018 “British F-35B conducts first trials armed UK-build weapons”