2022-12-16(令和4年) 松尾芳郎
日本の宇宙開発スタートアップ企業「アイ・スペース( ispace)」が開発する月着陸船「 HAKUTO-R (ハクト-R)」が、アラブ首長国連邦(UAE)の月探査車(moon rover)「ラシード(Rashid)」を載せて12月11日に米国で打ち上げられた。
(Japanese startups “ispace” lander carrying UAE moon rover, launched successfully by SpaceX’s Falcon 9 rocket from Cape Canaveral, on December 11, 2022. The UAE Rashid rover will be delivered to the moon by April 2023.)
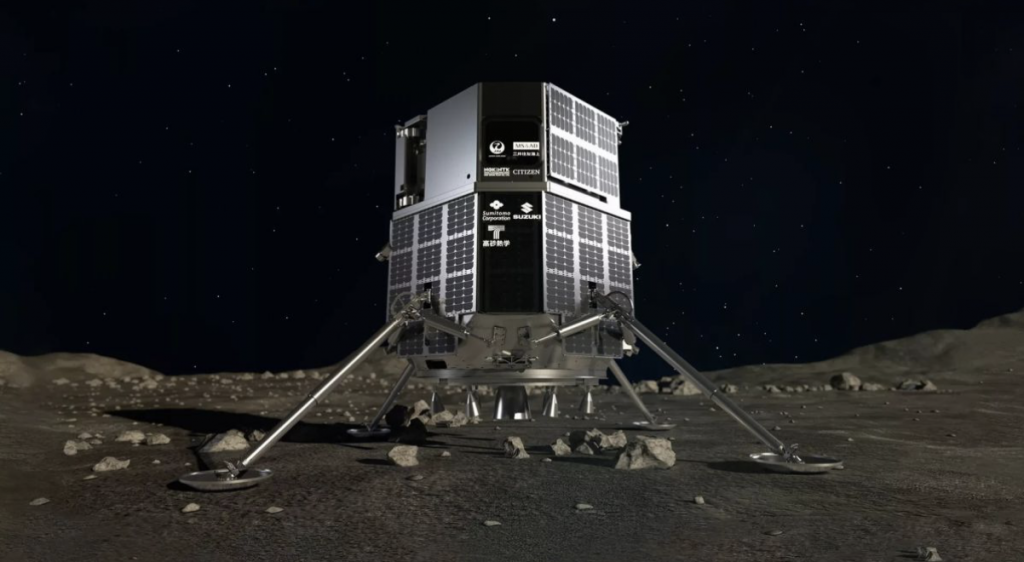
図1:(ispace) 月面に着陸した「ハクト-R (HAKUTO-R)/白兎(white rabbit)」着陸船の想像図。「HAKUTO-R」は脚を広げた状態で幅2.6 m、高さ2.3 m、自重340 kgの大きさ。
月に着陸船を送り込んだのは、これまでに米国、旧ソビエト、中国の3ヶ国だったが、今回日本製「アイ・スペース」の「HAKUTO-R」が月面着陸に成功すれば、UAE「ラシード」を含めて、月着陸クラブのメンバーは5ヶ国になる。
「アイ・スペース」の創立者兼CEOの袴田武史氏は先月11月に「UAEの“モハメド・ビン・ラシッド宇宙センター(MBRSC=Mohammed Bin Rashid Space Center)」(2006年創立)が、月面探査車(moon rover)「ラシード」の輸送に「HAKUTO-R」を選定した事は、我々に取り大変名誉な事」、「我が社は、月への民間輸送を業務とすることを目指している。最初の顧客UAE「ラシード」ローバーを無事に月に送り込めるか、世間の注目を集めている」、と話している。

図2:(マイナビニュース)打上げ当日「ispace」が日本橋で開いたライブ・ビューイング会場に展示した「HAKUTO-R」ランダーの模型。4本の脚を備え、上段に搭載されているUAE月面ローバー「ラシード」を卸すには右にあるステップ状の装置を使う。正面には「HAKUTO-R」を支援する企業のロゴが刻まれている。
UAEの月面探査車「ラシード」は重量10 kg、ソーラー・パネルの電力で動く小型の4輪車である。[ラシード]は、地球の14.7日に相当する月の一日を使って月面探査を行い、2日目に2回目の運用をして、月の夜間の厳しい環境に耐えられることを確認したのち廃棄される。着陸予定地点は月の北東部、北緯47.5度・東経44.4度の「氷の海」にあるクレーター「アトラス(Atlas)」で、気温は-183 ℃になる。
「ラシード」は、高解像度のカメラ、熱感知センサー、顕微鏡カメラ(microscopic imager)、および水分子プローブ(Langmuir probe)を備えている。この ”Langmuir probe”は、月面に降り注ぐ ”太陽風 (solar wind)” の影響で生じる荷電粒子を調べるのに役立つものと期待されている。
設計製作はMBRSCが2017年から行なった。次期ローバーの開発にも取組み中で2025年の打上げを目指している。

図3:{MBRSC} 月面に降りたUAEの月面探査車「ラシード・ローバー」の想像図。
打上げは順調;―
11日日曜日の朝、ケープ・カナベラル(Cape Canaveral, Florida)から「HAKUTO-R」を載せた「ファルコン(Falcon)9」ロケットが打上げられた。「ファルコン9」は、予定通り47分後に「HAKUTO-R」を分離、続いて6分後にNASAの小型プローブ「ルナー・フラッシュライト(Lunar Flashlight)」を放出した。そしてファルコン9の第1段ロケットは打上げから8分後に無事着陸した。
「ルナー・フラッシュライト」;―
放出されたNASAの「ルナー・フラッシュライト」は旅行用スーツケースほどの大きさで、自力で月に向かう。NASAではアルテミス月探査プログラム(Artemis moon program)」で、小型の宇宙基地「ゲートウエイ(Gateway)」を長楕円の月周回軌道 (near-rectilinear halo orbit)に投入する計画だ。「ルナー・フラッシュライト」はそれに先駆け来年2月頃にこの軌道に入る予定。
NASAの「ゴダード宇宙飛行センター(Goddard Space Flight Center)」 の「ルナー・フラッシュライト」担当主任技師「バーバラ・コーヘン(Barbara Cohen)」氏は、打上げ前の記者会見で次のように語っている。「月面にある暗いクレーターの表層は氷結した水分で覆われていると考えられ、これを「ルナー・フラッシュライト」のレーザー光線による反射光で確認する」、「月面にある氷結した水分のある場所を確定できれば今後の探査ミッションの遂行に大きく寄与することになる」。「ゴダード宇宙飛行センター」はメリーランド州グリーンベルト(Greenbelt, Maryland)にある。

図4:(NASA) 「ルナー・フラッシュライト」は、月面に存在する氷を探すために打上げられた。
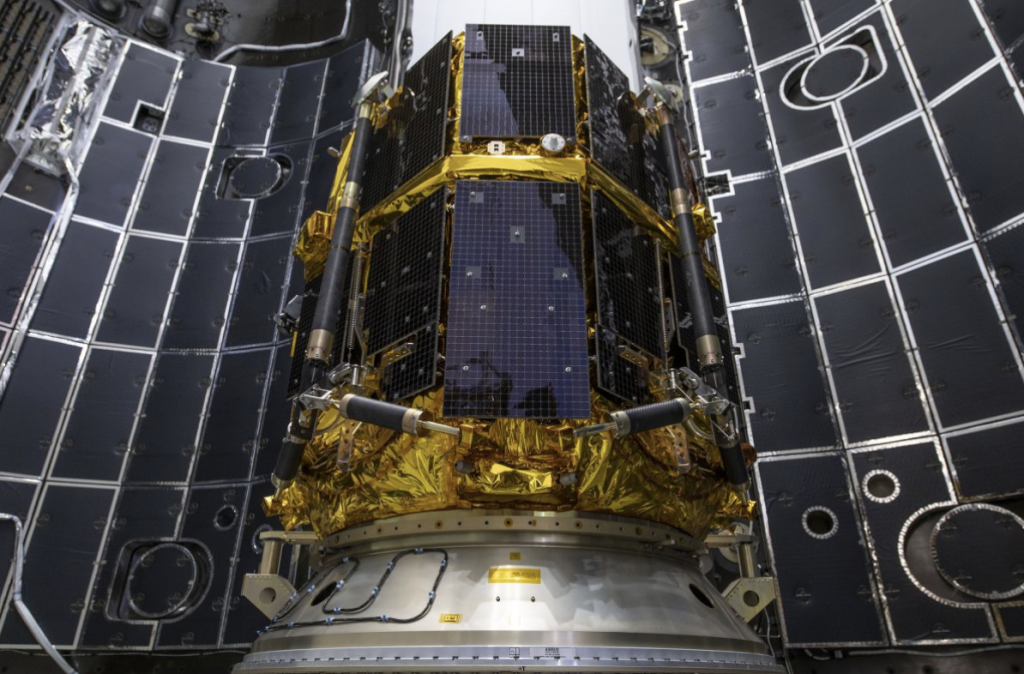
図5:(SpaceX/ispace) 「アイ・スペース」社の月着陸船「HAKUTO-R」ランダーがスペースX社の「ファルコン9」打上げロケットのペイロード室に取付けられた様子。
2022年12月11日16時38分(日本時間)に打上げられた「HAKUTO-R」mission 1ランダーは、「ファルコン9」ロケットにより所定の軌道に投入され、「アイ・スペース」の管制室との通信を開始した。これでランダーが安定した姿勢にあり、安定した電源供給を開始し、基幹システムが正常に働くことを確認した。この後顧客ペイロードに不備が無いことを確認してミッションの第3段階である「サクセス 3」を完了する。
燃料消費を節約するため月(地球から40万km)に直接向かわず、一旦地球から150万km離れる長楕円軌道で航行、それから月を回る周回軌道に入る。そして月の”冷たい海 (Sea of Cold)“と呼ばれる区域の南東にある「アトラス・クレーター (Atlas Crater)」に2023年4月に着陸する予定だ。
「アイ・スペース 」社は「HAKUTO-R」mission 1について、打上げから着陸までを10段階に分けて「マイルストーン」を設定、それぞれに設けた予定項目「サクセス・クライテリア」を達成することを目指している。これで、ミッション途中で生じた問題を正確に把握、次に予定しているミッションの改善に反映させたいとしている。
「アイ・スペース 」は、今回のミッション1に続いて、2024年に月着陸に向かうミッション2、そして2025年にはNASAの資材を月に運ぶ「民間月輸送協力プログラム(Commercial Lunar Payload Service program)」に参加するためのミッション3を行う計画を立てている。
2025年以降は、毎年2回月面輸送を計画しており、月面基地建設のため多様なペイロードを輸送したいとしている。
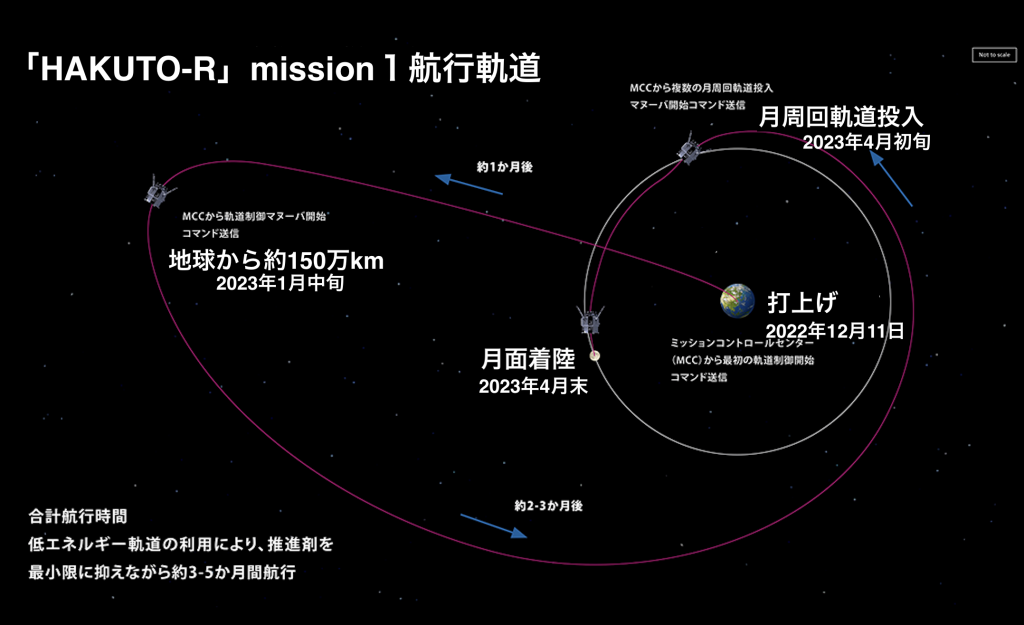
図6:(ispace)「HAKUTO-R」ミッション1の航行軌道。燃料を節約するため、一旦地球から150万km 離れ、それから月の周回軌道に入り、発車後4ヶ月ほどしてから着陸する。

図7:(ispace) 「HAKUTO-R」月着陸機/moon landerが、打上げロケット「ファルコン9」から分離して19時間後に、搭載のカメラで地球を撮影した写真、まるで三日月のように見える。現在システムのチェックアウトを実施中だが、正常に進んでいることを示すスナップ。
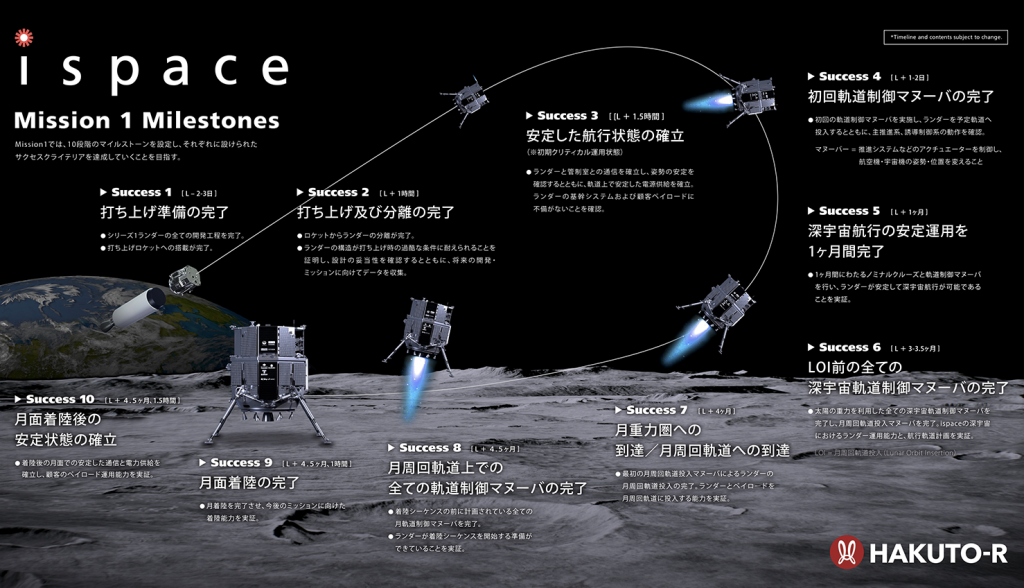
図8:(ispace) 「KAKUTO-R」ミッション1の航行図。

図9:(ispace) 「HAKUTO-R」ミッション1の月面着陸の過程を示す図。左端の「HAKUTO-R」の周回軌道速度をロケット噴射で減速、姿勢を立て直し(pitch up maneuver)、最終アプローチで目標地点を確認、着地する。

図10:(ispace) 「HAKUTO-R」mission 1に搭載されているペイロードは合計7種、いずれもランダーの上部のペイロード部に収納されている。
輸送中のペイロードは;―
- UAEドバイのMBRSC製の月面探査ローバー「ラシード(Rashid)」
- JAXA/タカラトミー・ソニー・同志社大学共同開発の変形型月面ロボット
- 日本特殊陶業製の非焼結型酸化物系固体二次電池
- カナダ宇宙庁(CSA=Canadian Space Agency)が採択したMCSS社のAIフライト・コンピューター
- カナダ宇宙庁(CSA=Canadian Space Agency)が用意するCanadensys社製カメラ
- HAKUTOのクラウド・ファンデイング支援者・企業の名称を刻印したパネル
- HAKUTOの応援歌「SORATO」を収録したデイスク
以下にペイロードの内容を簡単紹介する。
- UAEドバイのMBRSC製の月面探査ローバー「ラシード(Rashid)」
記述済みなので省略
- JAXA/タカラトミー・ソニー・同志社大学共同開発の変形型月面ロボット
変形型月面ロボットは、開発中の月面を走行する「有人与圧ローバー」の実現に向けて月面の資料を収集するための装置。月面を覆う砂(レゴリス)は地上の砂とは性状が異なりその詳細を知る必要がある。「変形型月面ロボット」は、直径8 cm程の球形で重量250 g、自走型で球が左右に開き走行する。
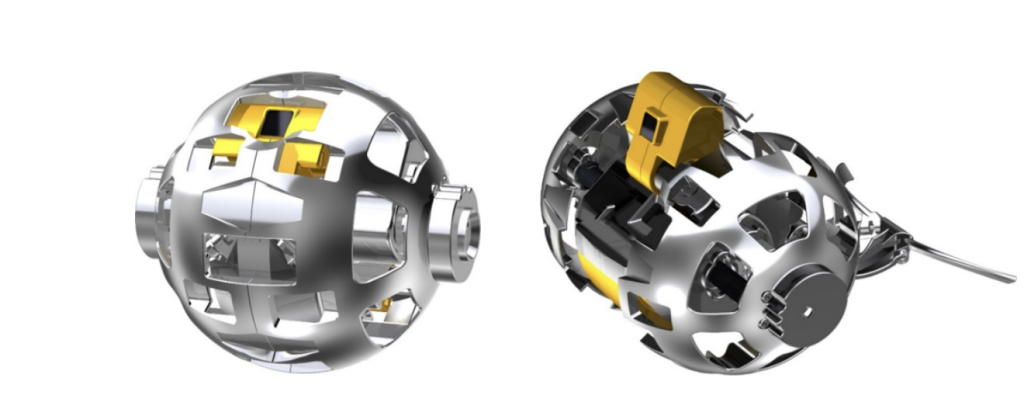
図11:(JAXA、タカラトミー、ソニー、同志社大学) 左の球形で月面に到着、右のように左右に開いて走行する。
- 日本特殊陶業製の非焼結型酸化物系固体二次電池
日本特殊陶業では非焼結型の酸化物系固体二次電池(固体電池と略す)を開発、このクラスで最高の容量・サイズを実現した。この固体電池は不燃性、有毒ガスを発生せず、過酷な環境・広い温度範囲で使用が可能となった。将来これは宇宙空間、自動車、潜水艦、防爆が必要な機器などに採用される見込みである。固体電池は、セラミック積層技術を応用し、容量0.5 Wh~10 Wh、多様なサイズ30 mm~110 mm、を作成。これを「HAKUTO-R」に搭載、-30℃~+150℃の温度範囲で実証する。従来のリチウムイオン電池の使用上限は+60℃である。
- カナダ宇宙庁(CSA=Canadian Space Agency)が採択したMCSS社のAIフライト・コンピューター
カナダのMCSS社(Mission Control Space Service)が開発する人工頭脳(AI)のフライト・コンピューター(Flight Computer)を月面に輸送し、同時に月面に送るUAEドバイMBRSC製の月面探査ローバー「ラシード(Rashid)」と共同で実証試験をする。
MCSSのアプリはエッジ・コンピューテイング(Edge Computing)技法で、デイープ・ラーニング(Deep Learning)アルゴリズムが使われており「ラシード」が撮影した画像から地形の特徴を認識できる。MCSSはカナダ宇宙庁の月面探査促進計画(LEAP =lunar Exploration Accelerator Program)の一つに採択されている。
- カナダ宇宙庁(CSA=Canadian Space Agency)が用意するCanadensys社製カメラ
カナダ宇宙庁は「LEAP」の中で前述の「MCSS」社とカメラを用意する「Canadensys」、自律航行システムを開発する「NGC」を選定している。「HAKUTO-R」では、ミッション中の重要な事象を「Canadensys」カメラで撮影する。またNGC開発の自律航法システムのデモのために月面画像を撮影する。
- HAKUTOのクラウド・ファンデイング支援者・企業の名称を刻印したパネル
「HAKUTO-R」を支援するコーポレート・パートナーには、日本航空、三井住友海上火災保険、日本特殊陶業、シチズン時計、スズキ株式会社、住友商事、高砂熱学工業、三井住友銀行、SMBC日興証券、が参加している。またメデイア・パートナーには、TBSホールデイングス、朝日新聞、小学館が参加している。
- HAKUTOの応援歌「SORATO」を収録したデイスク
株式会社「ispace」とは;―
「ispace」は、“人類の生活圏を宇宙に広げ、持続性のある世界へ”をビジョンに掲げ、月面開発に取り組んでいるスタートアップ企業、2010年に設立し、日本、ルクセンブルグ、アメリカに拠点を置き、200名以上のスタッフで活動している。
2022年7月までに270億円の資金を調達、月への輸送サービスをする小型ランダー・探査用ローバーを開発している。
「米国ispace」は、2025年に月の裏側に着陸する予定のNASAのCLPSプログラムに選ばれた「ドレイパー研究所」の計画に参画している。
「欧州ispace」は、「ispace」本社と共に、2020年12月に、月で採取した砂/レゴリスをNASAに販売する契約を締結した。
また、「欧州ispace」は、ESA(欧州宇宙庁)の「月面で水を抽出するプログラム(PROSPECT)」に参画している。
打上げロケット「ファルコン9/Falcon 9」;―
「ファルコン9」は「スペースX」社が設計・製作する再使用可能な2段式ロケットで、人員や貨物を地球周回軌道や宇宙空間に打上げる信頼性の高いロケット。これまでに188回の打上げ実績があり、打上げ後146回は1段目の着地・回収に成功、さらに打上げ再使用に使われたのは125回に達する。
今回使われたのは最新版「Block 5」で、これまで133回打上げに使われ全て成功している。
- 全体の大きさは高さ70 m、直径3.7 m、重量550 ton、低地球周回軌道(LEO)までのペイロードは22.8 ton、火星までのペイロードは4 ton。
- 第1段は、「マーリン(Merlin)」エンジンを9基備え、燃料タンクはアルミ・リチウム合金製、液体酸素とロケット用ケロシン(RP-1)を搭載する。発射時の推力はトータルで170万ポンド。
- 第2段は、「マーリン真空用(Merlin Vacuum)」エンジンを1基装備、ペイロードを所定の軌道に乗せる役割をする。2段目エンジンは、1段目が切り離されてから数秒後に着火、複数のペイロードを個別の軌道に乗せるために、着火・停止・再着火を繰り返しできるようにしてある。2段目エンジンは、推力22万ポンド、合計燃焼時間は397秒である。
- 中間段は、複合材製で第1段と第2段の間をつないでいる。内部にニューマチック・プッシャー(pneumatic pushers)があり、飛行中に第1段と第2段の分離に使われる。中間段の下部には4枚の超音速用グリッドフィン(grid fins)が付いている。これは、第1段が燃焼を終わり第2段を分離して大気圏再突入の際に、姿勢を制御するための装置。
- ペイロード室フェアリングは、炭素繊維複合材製で、ペイロードを大気圏外まで保護する役をする。フェアリングは、発射してからほぼ3分後に分離され、落下・回収され、再利用される。高さ13.1 m、直径5.2 mのサイズ。
- 「マーリン(Merlin)」エンジンは、スペースXが「ファルコン」系列用に開発した液体燃料(液体酸素[LOX]+ロケット用ケロシン[RP-1])を使うロケット。これも再利用を前提に設計されている。推力は845 kN (190,000 lbs)。
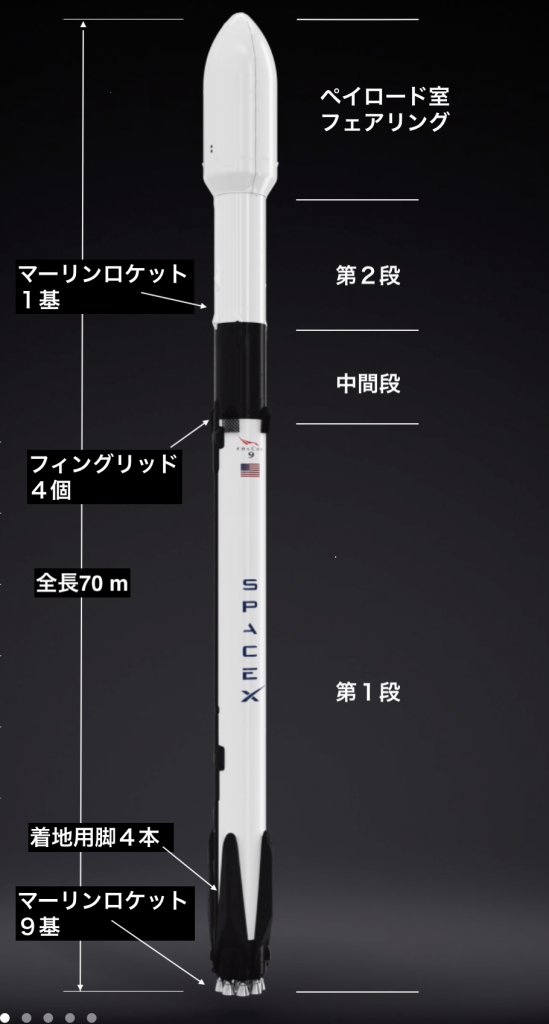
図12:(SpaceX)打上げに使われた「ファルコン9」。第1段は中間段と共に地上・洋上に降下、安全に着地し、再利用される。今回の「HAKUTO-R」の打上げには再利用5回目の第1段が使われれた。

図13:(SpaceX) 第2段分離後、際1段は中間段と共に大気圏内に入り、地上または洋上の曳船に着陸する。詳しくはTokyoExpress 2016-04-30 “米国、打上げロケットのロシア依存から自国製へ切り替えを急ぐ(その2)“を参照する。
―以上―
本稿作成の参考にした主な記事は次の通り。
- ispace 2022年12月12日 ”ispace、民間月面探査プログラム「HAKUTO-R」ミッション1・初期クリテイカル運用状態の完了を確認“
- Space com. December 11, 2022 “SpaceX launches Japanese landar,UAE rover to the moon” by Mike Wall
- JAXAニュース2021-5-27 “有人与圧ローバの実現に向けた変形型月面ロボットによる月面データ取得の実施決定について”
- Ispace News 2021-5-27 “ispace、JAXAと「超小型ロボットシステムの月面輸送・運用・データ取得」契約を締結
- Ispace News 2021-5-27 “ispace、2022年にカナダのAI技術を月に輸送”
- Ispace News 2021-5-27 “ispace、カナダ宇宙庁月面探査加速プログラム選定企業のサービス・プロバイダーに選定“