2020-05-08(令和2年) 豊岡秋久
2020年1月22日の第1回および4月11日の第2回で紹介した様に、LiDARは、Light Detection and Ranging (光検出と測距)もしくはLaser Imaging Detection and Ranging (レーザー画像検出と測距)の略で、光を用いたリモートセンシング技術の一つである。今回は、航空分野に関する応用、特に空港付近での風の計測のためのLiDARを中心に紹介する。ウインドシアと呼ばれる大気の現象を滑走路の近くに設置したLiDARあるいは航空機搭載のLiDARで検知することは、航空機の離発着時の墜落事故の防止策として重要である。
(As explained in the reports dated January 22 and April 11, LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remote-sensing technologies applying optics. In this report, the applications of LiDAR for aviation fields are introduced, especially, to measure the wind near airports. It is quite important to detect wind shear, dangerous atmospheric phenomenon, to avoid clash of aircrafts in their takeoffs and landings by the LiDAR equipment installed near runways as well as on aircrafts.)
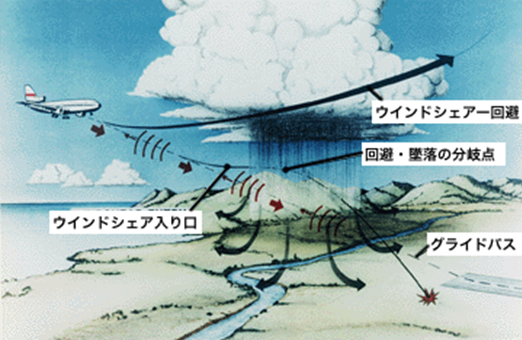
図1:(NASA) 航空機に対するウインドシアの影響を示した図。離着陸時の飛行機にとって極めて危険な存在。
1. ウインドシア(Wind Shear)とは何か?
ウインドシアは、急速に変化する風の流れである。マイクロバースト*と呼ばれる気象現象は、非常に強いウインドシアを生成し、航空機に大きな危険をもたらす。マイクロバーストは、地面に向かって急速に下降し、その後、外側に向かって放射される、局所的に短時間に発生する下降流である。マイクロバーストによるウインドシアは、雷雨時によく発生する。しかし地面の近くに雨がない場合にも発生する可能性もある。
*積乱雲の発生は上昇気流によるが、減衰期には、下降気流が発生し、この下降気流のうち、地上に災害を起こすほど極端に強いものをダウンバーストと言う。ダウンバーストのうち、4km以内の狭い範囲で発生するものをマイクロバーストと呼んでいる。
飛行機がウインドシアを通過する場合、最初に向い風が強まり、飛行機は上昇する圧力を受ける。パイロットがウインドシアに気が付いていないと、エンジン出力を低下させる可能性がある。飛行機がウインドシアを通過するに従い、下降気流になり、その後追い風となる。これにより、翼上の空気の速度が低下し、揚力と速度が失われる。飛行機は低出力で飛行していると、対気速度と高度の突然の低下に対して脆弱であり、ウインドシアが強い場合、飛行機が墜落する可能性がある。
飛行機が地面に近く、操縦を変更する時間や余地がほとんどない離着陸時に、ウインドシアは危険な存在である。着陸時には、パイロットはすでにエンジン出力を低下させており、下降気流を脱出するのに十分な速度を上げる余裕がない場合がある。また離陸中に航空機は失速状態に近づくため、この時点ではウインドシアに対して非常に弱い。
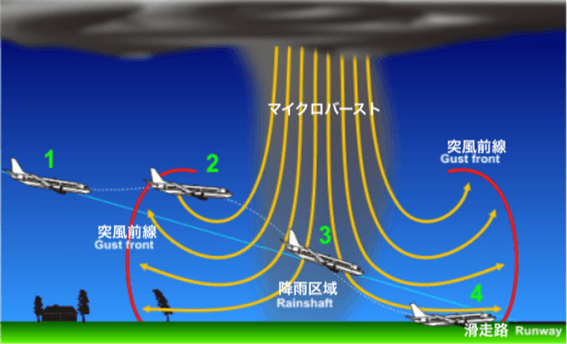
図2:(A320 Simulator) マイクロバーストを伴うウインドシェアは着陸する航空機にとり特に危険。「1」:高度1,000-3,000 ftで向かい風が強まる。「2」:機体がグライドパスより浮き上がる。「3」:続いて強い下向きの風「ダウンバースト」に入り高度が下がる。「4」:「ダウンバースト」から脱出できれば良いが、強い追い風を受けるので対気速度が落ち揚力を失い墜落しやすい。
2008年から2017年までの10年間に、日本国内で起きた大型航空機事故のうち、40%超が乱気流を原因としている。気象予報や機体に搭載した気象レーダは、乱気流を内包する可能性が高い積乱雲等の雨雲の中にある雨粒の動きを検知できるので、雨雲を伴った乱気流をある程度予測することはできるが、雨雲を伴わない乱気流(晴天乱気流)を事前に察知することは困難である。もし事前に乱気流を察知することができれば、乱気流のエリアを迂回したり、迂回できなかったとしてもシートベルト着用サインを出したり、客室サービスを中断するなど、さまざまな対応が可能になり、事故の低減が期待できる。
2. ウインドシアによる事故例
話題が少し本題の技術的事項からは離れるが、ウインドシアによる事故の代表的なものを幾つか紹介する。
(1) フライドバイ Boeing B737-8KN (A6-FDN) FZ981
フライドバイ981便 (FZ981/FDB981) 墜落事故は、2016年3月19日03時42分(現地時間)、ロシアのロストフ・ナ・ドヌ空港への着陸を復行していたフライドバイの運行するボーイング737-800型機が墜落し、乗客乗員62人全員が死亡した航空事故である。

図3:(AVIATION ACCIDENTS) フライドバイ981便の惨状
2016年3月19日のINTERSTATE AVIATION COMMITTEE(CISの機関)による事故報告の概要は以下の通りである:
3月18日18:37にDubai空港を離陸、計器飛行で高度36,000 ftに到達、巡航に入り22:17に降下を開始、乗員はロストフ空港管制官から天候とランウエイ情報を入手。
降下の途中でコクピットのウインドシア警報装置が作動したため、22:42に着陸を回避。
上空で待機後、00:23に再度降下着陸を要請、この時はILS(計器着陸)による着陸であった。しかしこの時も乗員は着陸回避を決め、高度253mで回避を開始。高度1,020mに達した時に激しい下降気流を受け、00:41に地表に激突(ランウエイ端から約120m)。 墜落時の下降角度は50度でIAS(対気速度)は630km/hであった。
(2) 全日空 – Airbus – A321-131 (JA-104A) NH391

図4:(AVIATION ACCIDENTS) 全日空機の事故のあった滑走路
NH391は、2002年1月21日11;53に名古屋を出発。
函館空港はRWY12の風は130°/28ktで強く少しばかり右からの横風と報告。航空機の進入路とフライトパス角度は、進入時は正常であったが、コクピットのウインドシア警告システムが作動、音声警告が出た。この時は滑走路から140m、高度は53ft(16 m)で、進入灯の上を通過していた。乗員は直ちにgo-around(着陸回避)を開始し、ウインドシアの影響から回復を図ったが、後部胴体は滑走路に接触した。(13:03) この結果、かなりの損傷を受けた。
この後、ウインドシアの影響からの回復を継続し、RWY 12にILS進入、13:21に無事に着陸。乗客87人と乗務員6人のうちキャビンクルー3人が軽傷を負った。
この事故では、最終着陸進入時高度約100ft(30 m)で強いウインドシアに遭遇し、回避操作を試みるも、十分な上昇が出来なかったため、後部胴体の下面が滑走路に衝突した。
(3) 中華航空 – Boeing B747-409B (B-165) CAL605
1993年11月4日、中華航空605便は乗員22人、乗客274人を乗せて台湾の中正国際空港を離陸し、香港の啓徳空港に向った。機体はボーイング747-409で、完成して1年にも満たない新鋭機であった。

図5 (AVIATION ACCIDENTS) 事故を起こした中華航空 CAL605
605便は順調に飛行し、啓徳空港への着陸進入を始めた。しかし、香港の南南西約300キロを中心とした熱帯低気圧の影響を受けており、東からの強い突風があり、雨で滑走路は濡れた状態であった。この影響を受けて、対気速度の持続的な低下と異常に高い降下レートが特徴のウインドシアに遭遇した。605便はタッチダウン・ゾーン内には接地したが、着陸後まもなく、翼揺れが始まり、逆噴射はロール制御が回復するまで延ばされた。その後、強い車輪ブレーキと逆噴射をかけたが、滑走路内で停止できずオーバラン、海に落ちて浅瀬で停止した。死者は発生しなかったものの10人が負傷した。
(4) Bhoja Air Boeing-B737-236A (AP-BKC) Flight BHO213
Bhoja AirのフライトBHO213(機体はボーイングB737-236A)は、2012年4月20日にジンナ国際空港(カラチ)からベナジルブット国際空港(イスラマバード)まで飛行する予定であった。カラチから17:05(現地時間)にイスラマバードに向けて離陸。イスラマバードの天候は、激しい風を伴う雷雨と報告されていた。
ベナジルブット空港に着陸するためのアプローチ中に、滑走路30に対して計器着陸システム(ILS)による着陸が許可された。その後、着陸まで6マイルの地点で管制塔より最終的な着陸許可のために周波数の切替えの要求が出された。これに対して、BHO0213は周波数切替えを行ったが、着陸許可の指令に対してBH0213からの応答は無かった。
数分後、地元住民からの電話で、航空機がフセインアバド(滑走路30から約6kmの地点)の近くで墜落したことが判明。航空機は破壊され、127人の乗員(121人の乗客+および6人の搭乗員)の即死が確認され。

図6:(出典:AVIATION ACCIDENTS) Bhoja Air事故機の状況
3. 空港および航空機搭載用LiDAR開発
ウインドシア検知のために、LiDAR、マイクロ波レーダ、赤外線センサ等も用いられているが、LiDAR(特にドップラーLiDAR)は有力な検知手段である。
ドップラーLiDARは、航空機からレーザー光を放射して、大気中に浮遊するエアロゾル粒子(微細な水滴やちりなど)からの散乱光を受信し、ドップラー効果による光の波長変化を調べることにより、波長変化による気流の変化、すなわち乱気流を探知する技術である。これにより多くの航空機搭載型の気象レーダで検知できなかった晴天乱気流を知ることが可能となる。
LiDARは、大気中の目的の測定領域に向かって単色光のビームを放射、光はダスト粒子に対してはミー散乱(光の波長程度以上の大きさの粒子による光の散乱)、空気中に含まれる分子に対してはレイリー散乱(光の波長の1/10以下の場合の散乱)を受ける。 光の一部は、レーザー発光源に向かって180°後方散乱され、レーザー発信源の横に設置された受光部に受信される。 粒子(および分子)は非常に軽いため、その動きは完全に空気の動きに追従し、対気速度(航空機と大気の相対速度)の測定が可能である。LiDARの受光部によって収集された後方散乱光は、ドップラー効果によってΔf= 2VR /λの量だけ周波数が変動を受ける。ここで、VRはRadial velocity(視線速度;観測者から見た速度)、λはレーザー波長。 ドップラーLiDARは、後方散乱信号の周波数を分析することにより、対気速度を得ることができる。(ドップラーLiDARの原理を図7に示す。)
旅客機に搭載した気象レーダは、乱気流を内包する可能性が高い積乱雲等の雨雲の中にある雨粒の動きを検知できるので、雨雲を伴った乱気流をある程度予測することは可能だが、雨雲を伴わない乱気流(晴天乱気流)を事前に察知することは困難である。
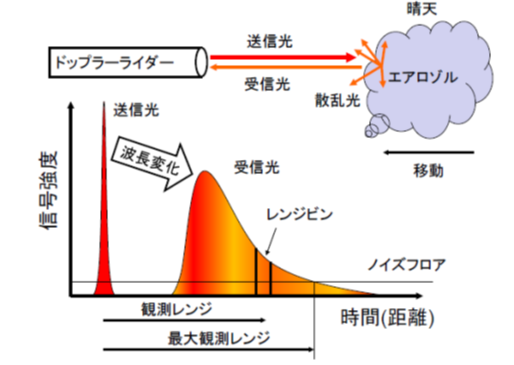
図7:(JAXA) ドップラーLiDARの原理
3.1 NASAにおいての研究
ラングレー研究所で1986年からウインドシアの研究が開始され、分析から始まり、シミュレーション、飛行試験へと進んだ。この取組みは、1975年のニューヨーク、1982年のニューオーリンズ、1985年のダラスフォートワース、での致命的な事故があった事が発端となっている。1964年から1985年の間に26機の民間航空機がウインドシアにより墜落し、約500人の死者と200人の負傷者が発生している。
ドップラーLiDARをベースとしたシステムは、地上の散乱物(移動中の車など)の影響を回避できる。 ただし、強雨下では動作しないことに注意が必要。 図7のシステムは、Lockheed Corp.’s Missiles and Space Co.(カリフォルニア州)、United Technologies Optical Systems Inc.(フロリダ州)およびLassen Research(カリフォルニア州)によって製造されたものである。

図8:(NASA) 737に搭載されたLiDARセンサー
NASAと連邦航空局(FAA)のウインドシアおよびその検出システムでの協力
1986年にNASAとFAAは、ウインドシアを検出して回避する方法を開発するために協力することに同意。 NASAとFAAの共同の取組みは、議会の決定と「NTSB(運輸安全委員会)」の勧告に応えたものである。 FAAは飛行安全プログラムを作成し、NASAのウインドシア検出技術の開発を支援した。分析、シミュレーション、実験室内試験、および飛行試験から収集されたデータは、FAAが民間航空機に設置するウインドシア検出予報システムを認定するのに役立つものである。
大気とエアロゾルの観測への応用
エアロゾルによる風観測用ドップラーLiDAR(DAWN)を開発。これまで、DAWNは航空機に搭載され、2017年に北大西洋、メキシコ湾、カリブ海の対流雲を調べる対流プロセス実験に使用されている。また、欧州宇宙機関(EAS)に協力し、ドップラーLiDARを使用して風のプロファイルを測定する衛星であるAtmospheric Dynamics Mission Aeolus (ADM Aeolus)の測定結果を検証することも目指している。

図9:(NASA) 高高度LiDAR観測(HALO)の装置
ここでは詳細の記述はしないが、NASAのLiDARを適用した雲やエアロゾルを含む大気の観測のミッションとしては以下の内容がある。
High Spectral Resolution Lidar 2
Cloud Lidar System
Multicenter Airborne Coherent Atmospheric Wind Sensor
Differential Absorption Lidar
High Spectral Resolution Lidar
Doppler Aerosol WiNd Lidar
Lidar Atmosphere Sensing Experiment
Airborne Laser Terrain Mapper Experiment
Aerosol Lidar
Slope Imaging Multi-polarization Photon-counting Lidar
Tropospheric Wind Lidar Technology Experiment
Tropospheric Wind Lidar Technology Experiment
Multi-functional Fiber Laser Lidar
Land, Vegetation and Ice Sensor
Cloud Physics Lidar
Airborne Topographic Mapper
Broadband CO2 Lidar – 1.5 micron version
Airborne Raman Ozone, Temperature, and Aerosol Lidar
Airborne Coherent Lidar for Advanced In-flight Measurements
3.2 香港国際空港の設置例
香港天文台(HKO)は、2002年にドップラーLiDARを香港国際空港(HKIA)に導入した。これは、世界で最初の航空警報サービス用LiDARである。それ以来、HKOはLiDARの速度と後方散乱パワーのデータに基づいて多くの気象関連製品の開発を行った。
アプリケーションには、滑走路進入時の自動ウインドシア警告、低高度での乱気流の検出、複数ドップラー解析に基づく激しい対流の2D観測、地形によって乱された風の3D観測などである。
パルスドップラーLiDARは、天候の良い条件(降雨では無い状況)下で、地形に影響され発生する低高度のウインドシアの検出に適している。これは、香港空港へのLiDARの導入の主な理由であり、また装置は小型、堅牢であり、運用において高いシステム効率を発揮する。
図9はLiDARがグライドパス(航空機進入経路)に沿ってスキャンを行っている様子を描いたもの。また図XXはLiDARを利用したLWAS(LiDARウインドシア警告システム)によって検知されたウインドシアの向かい風の急速な変化を示している。
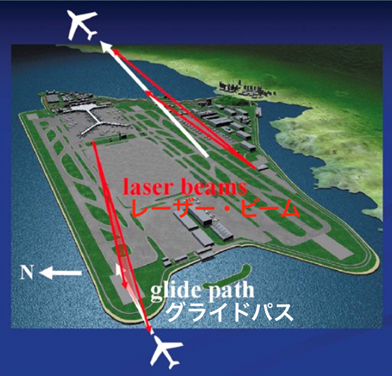
図10:(The Open Atmospheric Science Journal, 2009, 3) 香港国際空港でのLiDARによる航空機進入路(glidepath)スキャンの様子
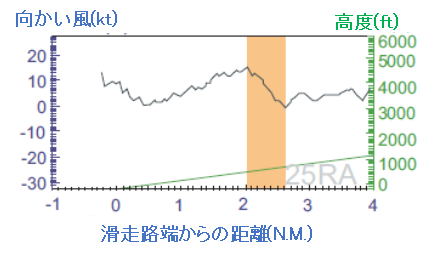
図11:(The Open Atmospheric Science Journal, 2009, 3) LWAS(LiDAR ウインドシア警告システム)により検出されたウインドシアの向かい風の変化(赤色の部分)
3.3 ONERAの研究
ONERAは、フランスの国立宇宙航空研究センターであり、航空機利用の需要の拡大に対して、空港の効率アップ、特に離着陸の航空機の間隔を最適化することに取組んでいる。航空機が作る翼端渦(伴流渦)や、乱気流、ウインドシア、突風などの大気現象の検出の研究をしており、ドップラーLiDARが一つの研究対象である。
ONERAの新しいコヒーレントLiDARは、大パワー、高スペクトル輝度、全ファイバー光源の採用により長距離計測に成功し、各種のLiDARのアプリケーションに適用され、性能実証、技術評価がされている。様々な誘導ブリルアン散乱(SBS)による技術を用いて光の非線形性の問題点を解決し、目に安全な、ピークパワーの大きな発光源の開発が行われた。(ONERAは、LiDAR関連でウインドシアの他にリアルタイムの翼端渦の特性評価のアルゴリズム等も開発)
高出力ファイバレーザーは最適化されたコヒーレントLiDARアーキテクチャーと共に、空港の安全性や航空機のナビゲーションに適用される以外に、防衛、セキュリティ、宇宙などの他のアプリケーション分野にも適用が期待できる。
図12は、UFOヨーロッパプロジェクトの下で、ToulouseのBlagnac 空港で2か月のテストを実施した機器であり、Leosphere社(フランス)のWindcube200S® に1.5μmの高出力パルスファイバー増幅器を組合わせた構成となっている。図13はこの装置によって取得された空港での風のデータの一例である。
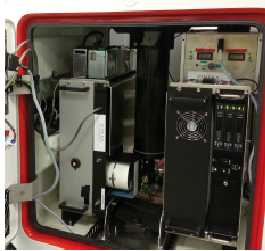
図12:(Journal Aerospace Lab Dec. 2016) ONERAのLiDARテスト機器
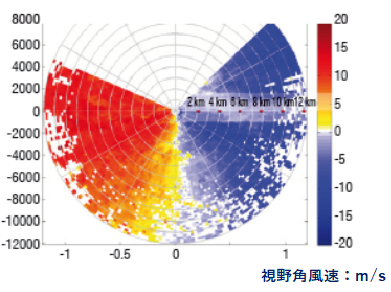
図13:(Journal Aerospace Lab Dec. 2016) ToulouseのBlagnac 空港において取得された風速の(視野角風速)データ
3.4 エアバスによる航空機搭載LiDAR開発
エアバスでは航空機搭載用LiDARの開発を行なっている。以下はその内容の一部である。
航空機と大気の間の相対速度、つまり対気速度を測定することは、航空機搭載LiDARの測定機能である。この機能で利用される主な物理的効果はドップラーシフトであり、放出されたレーザービームに対して受信した後方散乱光は周波数シフトを引き起こす(図14)。周波数は、相対速度が正の場合は青色側に、負の相対速度の場合は赤色側にシフトする。ドップラー効果は送信光ビームに対して同一直線上にのみ起こるため、3次元の独立方向の対気速度測定を行う3つのレーザービームを使えば、3次元の空気流ベクトルを知ることができる。
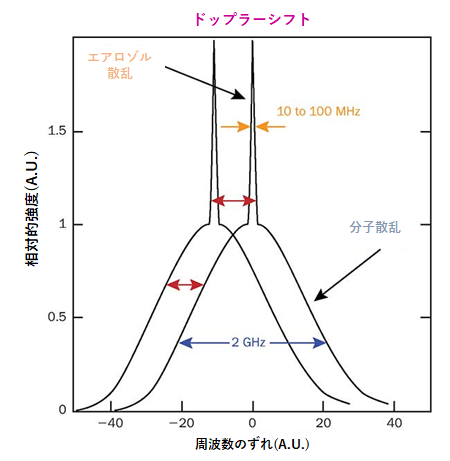
図14:(Photonics Spectra/Airbus)エアロゾルによる散乱と分子による散乱:前者は、鋭いピークとなるため、ドップラーシフトから対気速度を容易に得られる。
長距離でのLidar測定は、従来の大気データ測定方法よりもはるかに幅広い情報が得られる。快晴の大気中でも、ウインドシア、突風、渦、乱気流などの大気の擾乱を、3つの前向きの光ビームによって測定できる。これは、乱気流の検出に通常使用される気象レーダ等の従来の手法では測定できない範囲である。飛行制御に直接接続されているLiDARシステムは、大気の擾乱現象を計測しすることにより、高度なオートパイロットを可能とする。

図15:(Photonics Spectra/AirBus) 前方監視LiDARを搭載した航空機は乱気流および強風からの影響に対して、操縦翼面を制御して平衡を保つことができる。
3.5 Lockheed MartinによるLiDAR開発(WindTracer®)
Lockheed Martinにより開発されたWindTracer®(LiDAR)は、航空の安全性と効率の向上、防衛およびセキュリティ運用の支援、風力資源の測定、気象研究において世界中で使用され、注目を集めている風に係る測定技術である。
Lockheed Martinが開発した「ウインド・トレーサー(WindTracer®)」は、航空管制官にリアルタイムで“風”に関わる危険性を知らせ、それに基きパイロットは安全な操縦ができるようになる。突然の風の変化、例えばウインドシア、マイクロバースト、突風前線、乱気流は、離着陸時の航空機の安全性を損なう可能性がある。WindTracerは、リアルタイムの警告をすることで、パイロットが危険な風の区域への飛行を回避するのに役立つ。

図16:(Lockheed Martin) Lockℍeed Martinが開発した空港用LiDAR WindTracer®
「ウインド・トレーサー」は、飛行中の航空機が作る翼端渦で生じる乱気流も測定できる。あらゆる飛行機は後方に翼端渦流を生じる。大型機の翼端渦流は非常に大きく、後続機の安全を脅かすほどにもなる。この危険を回避するため、先行機と後続機の距離を十分開ける必要がある。「ウインド・トレーサー」で得られた情報に基ずき、各國空港では離発着機の最小安全間隔を決めて運用している。
「ウインド・トレーサー」の主な仕様を示す。
(1) 測定範囲
通常の範囲:300 mから15 km
最大範囲:33 km
視線方向(半径方向)の風速範囲:±40 m/s
推奨最小分散エアロゾル分解能:100 m
(2) レーザースキャナー
方位角範囲:無制限(連続回転用のスリップリングが組み込まれている)
仰角範囲:無制限(連続回転のためのスリップリングを組み込まれている)
ポインティング精度:方位角:±0.014°、高度:±0.040°
スキャナー解像度:0.001°d
光開口部:12 cm
(3) 光送受信部:
レーザー波長:1617 nm
パルスエネルギー:2.5±0.5 mJ
パルス持続時間:250±50 nsec
パルス繰り返し周波数:750 Hz
ビーム径:9.6 cm(1/e 強度幅)
(4) 電源仕様:
200〜240 VAC、単相、50または60 Hz、50A
3.6 JAXAによる開発状況
「乱気流事故防止機体技術の実証(SafeAvio)」では、これまで検知が不可能だった晴天乱気流を検知する航空機搭載用のドップラーLiDARを開発し、パイロットへ乱気流情報を提供する「乱気流事故防止システム」を飛行試験した。ドップラーLiDARは、前方にレーザー光を照射し、気流と同様に運動する空気中の小さな粒子(エアロゾル粒子)に当たった光の散乱を計測することができる。その計測データから、計算によりエアロゾル粒子の動きを知ることができる。ドップラーLiDARは、羽田空港や成田空港などでも運用されているが、非常に高価でサイズも大きなシステム。
旅客機が巡航する10km以上の高高度では、エアロゾル密度が減少し散乱光が弱くなるため、より強力なレーザー光が必要となる。一方で、航空機への搭載を考慮した場合、できるだけドップラーLiDARの重量を軽くしなければならない。つまり、軽量かつ高出力のドップラーLiDARが必要となる。2011年に重量が約150kgで、高度12,000mの高高度において約9km先の乱気流を検知することが可能な航空機搭載型のドップラーLiDARを開発。高高度でも乱気流検知できることを飛行実証し、翌2012年2月には晴天乱気流の事前検知に世界で初めて成功した。
2017年1月から2月にかけて行った飛行実証試験では、気流の検知距離としては世界トップとなる17.5km(各高度平均値)先にある気流の動きを観測。これは、乗客1人分程度の重量のシステムで約70秒前に乱気流を検知することができ、乗客にシートベルト着用を促す時間余裕を生み出すことによって、負傷者を6割以上減らすことが可能となる。
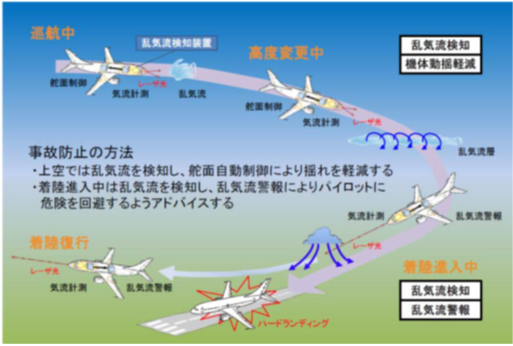
図17:(JAXA) 航空機搭載LiDAR運用イメージ
この研究開発成果が米国ボーイング社から高く評価されたことにより、2018年2月には同社が実施する「エコデモンストレーター2018プログラム」において晴天乱気流検知システムを大型機(ボーイング777型機)に搭載して飛行試験を実施。航空機アビオニクスとしてのドップラーLiDARと情報提供の実用化に向けた評価を得られた。また、航空機への搭載、搭載後の調整および運用に関する技術課題などの知見が得られた。大型旅客機への実装の実現性が確認できたことで、今後の晴天乱気流検知システムの実用化に向けたさらなる研究開発を進めている。(図17に搭載機の例、表1に仕様を示す)
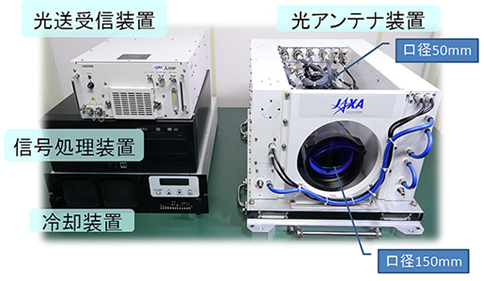
図18:(JAXA) 航空機搭載用ドップラーLiDAR
表1 搭載型の晴天乱気流検知装置(ドップラーLiDAR)
性能・仕様(2016年)
レーザー波長 1.55㎛
光出力 3.3W
ビーム径 150mm+50mm
重量 83.7kg
消費電力 936W
さらにLiDAR技術を応用し、空中に漂う火山灰や氷晶を遠隔検知する機能を具体化する検討を行っている。飛行中に火山灰や氷晶が多い高度・空域を特定できれば、トラブルの可能性が高い空域を回避できる。また、どうしてもこの様な空域を飛行しなければならない場合にも、吸い込んだ火山灰の量を推定し、点検整備に活用することが可能になる。火山灰や氷晶はエアロゾル粒子よりも大きく検知は容易であるが、物質まで特定するには、ドップラーLiDARのシステム構成を二重化して差分を調べる必要がある。
3.7 気象庁による空港でのLiDAR適用
空港気象ドップラーLiDARによる観測
空港気象ドップラーLiDARは、積乱雲などからのダウンバーストに伴う「マイクロバースト」や「シアーライン」と呼ばれる風の急変域を検出する装置である。現在、成田国際空港、東京国際空港、関西国際空港に設置されている。空港気象ドップラーLiDARで検出した風の急変域の情報は、管制官や航空会社の運航担当者などに速やかに提供され、航空機の安全な運航に活用されている。
空港気象ドップラーLiDARの仕組み
空港気象ドップラーLiDARは、レーザー光(パイロットの目に安全な波長帯を使用)を大気中に発射し、エアロゾルの動きを捉えた散乱光を探知する。 動いているエアロゾル*に衝突した電磁波は散乱する際、その周波数が変化する(ドップラー効果)。このドップラー効果を利用すれば、対象物の移動速度を観測することができる。空港気象ドップラーLiDARは、降水粒子よりも小さいエアロゾルの動きを捉えることにより、降水を伴っていないときでも上空の風を観測することができる。
*エアロゾル(Aerosol): 大気中に浮遊する塵(土壌粒子、海塩粒子、火山噴火から生ずる粒子、自動車や工場などから放出される汚染粒子など)のこと。

図19:(気象庁HP) 東京国際空港 空港気象ドップラーLiDAR1号機
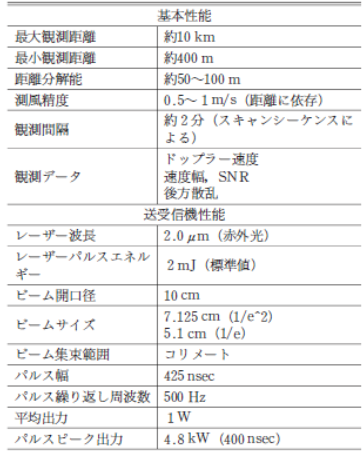
気象庁が使用しているドップラーLiDARの基本性能および送受信機の性能を表YYに示す。
表2 LiDAR の基本性能と送受信機の性能
3.8 情報通信研究機構他の航空機搭載用コヒーレント・ドップラーLiDARの開発
情報通信研究機構では、対流圏の風向・風速とエアロゾルの空間的な情報が得られる航空機搭載用コヒーレント・ドップラーLiDARの開発を行っている。
航空機搭載実験の一つとして、コヒーレント・ドップラーLiDARをGulfstream IIに搭載し、名古屋-日本海、名古屋-太平洋沿岸-伊豆諸島の2エリアで延べ7時間のフライトで実施。レーザーは、目に対する安全性を考慮し、単一波長2.0125μm, パルスエネルギー7mJ/pulse, 繰返し周波数100Hz, のLD励起によるQスイッチTm:YAGパルスレーザーを使用。
図20は、2004年6月10日に日本海上空行った航空機搭載のLiDARによる風の測定とドロップゾンデの比較実験は非常に興味深い。航空機は高度約7.5kmを時速約680km、ピッチ角一定(約2.6º)で巡航。コヒーレントドップラーLiDARとドロップゾンデによって得られる結果を比較するために、航空機はドロップゾンデの投下点が中心とるように十字飛行を行った。

図20:(第24回レーザセンシングシンポジウム) 航空機搭載の2μmのコヒーレントLiDAR
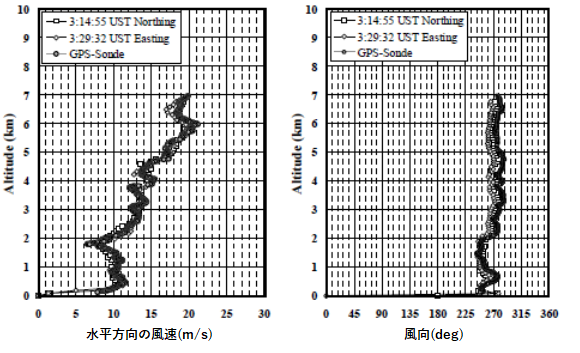
図21:(第24回レーザセンシングシンポジウム) LiDARによる測定とドロップゾンデによる測定の比較
3.9 三菱電機のLiDAR開発
三菱電機の気象関連市場でのコンセプトは、LiDAR・レーダ統合システムである。
ドップラーLiDARは降雨を伴わないドライマイクロバーストを検出。
気象レーダは、降雨を伴うウェットマイクロバーストや発達した積乱雲を検出。
LiDAR・レーダの検出結果を総合出力することで、低層ウインドシアを含むあらゆる気象条件を検出するシステムを提供。(各レーダの適用範囲などは以下の通りである。)
検出ターゲット センサ ターゲットエリア
レーダ LiDAR
ドライマイクロバースト、ガストフロント 検出不可 検出 航空機の離発着エリア
ウェットマイクロバースト、ガストフロント 検出 検出不可
降雨 検出 減衰 ターミナルエリア
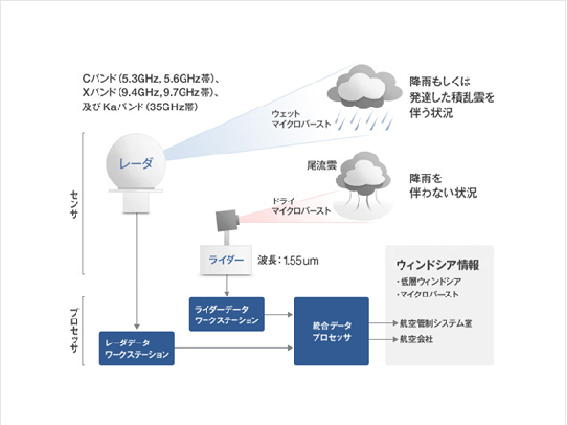
図22:(三菱電機HP) 三菱電機のLiDAR・レーダ統合システム
以下に地上設置型および航空機搭載型の製品を紹介する。
(1) 地上設置型長距離LiDAR(DIABREZZA_A)
主な特徴は以下の通り
大気境界圏内において、高出力のWGA(Wave Guide Amplifier)技術により、水平距離30km※までの風速を計測。
低層ウインドシア警報システム(LLWAS)用途としてICAO推奨基準を満たす装置である。
雨滴をターゲットにするレーダと異なり、晴天時でも風速を計測可能。
アイセーフ波長レーザーを使用し、目に対する安全を考慮。
低層ウインドシア検出のために信頼性の高いアルゴリズムを導入。
計測管理ソフトウェアが全自動計測、スケジュール計測を行う。

図23:(三菱電機HP) 空港設置型LiDAR製品 DIABREZZA_A
本製品は、これまで世界各地の主要空港において運用実績があり、また現在複数空港への新規導入を予定。
(2) 航空機搭載型LiDAR
前方の晴天乱気流を事前に検知し安全な航行を確保するための航空機搭載ドップラーLiDAR。(現在開発中)

図24:(三菱電機HP) 航空機搭載型LiDAR
主な特徴
当社独自の導波路型光増幅器(WGA)技術を採用し、2017年に行われた宇宙航空研究開発機構(JAXA)の飛行試験では平均検出距離17.5kmを計測。(平均検出距離は低高度から高高度で測定された値であり、検出距離は、気象条件によって変動)
ドップラー効果により晴天時の乱気流及びウインドシアの検知が可能。
アイセーフ波長レーザーを採用し、目に対する安全を考慮。
2018年にボーイング社が行ったエコデモンストレーター・プログラムの飛行試験に本開発品が選ばれている。
―以上―
本稿作成の参考にした記事等は次の通り。
Wikipedia: ウインドシア
NASA Langley Research Center: “Making the Skies Safe from Windshear”
JAXA 航空技術部門:乱気流事故防止機体技術の実証 (SafeAvio)
AVIATION ACCIDENTS:https://www.aviation-accidents.net/
JAXA 航空技術部門:「遠方の気流を測るドップラーライダーとその関連技術」(JST説明会資料)
NASA:NASA Testing Airborne Lasers to Touch the Wind
NASA:NASA Airborne Science Program
The Open Atmospheric Science Journal, 2009,3:Aviation Applications of the Pulsed Doppler LIDAR – Experience in Hong Kong
Journal Aerospace Lab Dec. 2016:Doppler LIDAR Developments for Aeronautics
Photonics Spectra 2018. Feb.:Onboard Lidar Detects Turbulence, Volcanic Ash Near and Far
Lockheed Martin HP:WindTracer
気象庁HP航空気象:「空港気象ドップラーLiDARによる観測」他
日本気象学会誌「天気」2009年(56.10):「空港気象ドップラーライダーによる非降水低層ウィンドシアーの観測」
第24回レーザセンシングシンポジウム:航空機搭載用コヒーレントドップラーライダーの開発②
三菱電機HP:三菱電機ドップラーライダー/レーダシステム