2020-08-26(令和2年) 松尾芳郎
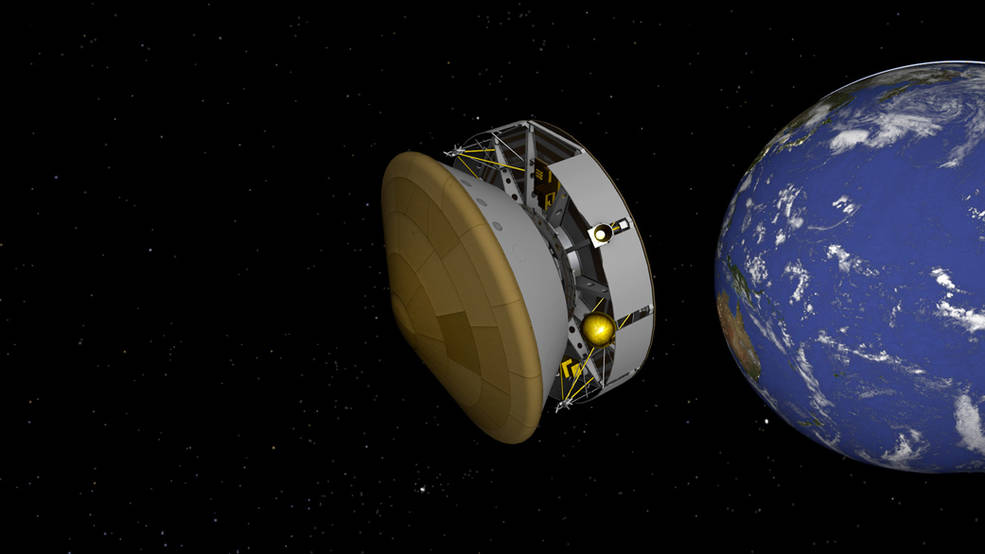
図1:(NASA/JPL-Caltech) 火星探査機「パーセビランス」は7月30日ケープカナベラルから打上げられ、7ヶ月後の来年2月18日に火星に着陸する。図は巡航に入った「パーセビランス」宇宙機の想像図。左の茶色部分「ヒート・シールド」と灰色の「バック・シェル」に中に「パーセビランス・ローバー」が収められている。その右の短い円筒は巡航中の通信などをする「クルーズ・ステージ」。
NASAの“火星2020ミッション (Mars 2020 Perseverance rover mission)” の火星探査機「パーセビランス(Perseverance・忍耐、頑張りの意)」は、2020年7月30日に打上げられ火星に向かう軌道上にある。「パーセビランス」はこれまで作られた中で最も精巧なローバー(rover)/地上走行車で、火星大気圏を飛行するヘリコプター「インジェニュイテー(Ingenuity・工夫の意)」を携行し、目的地「ジェゼロ・クレーター(Jezero Crater)」に着陸、半年間(火星時間)地上を走行し調査をする。
(NASA’s Mars 2020 Perseverance rover mission was launched on July 30, 2020. The most sophisticated rover ever build, with the Ingenuity Mars Helicopter traveling with it, will search millions of kilometer over the next six months to Jesero Crater.)
火星表面の走行探査は、これまでに「キュリオシテイ(Curiosity)」、「インサイト(InSight)」などが行っているが、これらの探査で得られた成果は全て今回のミッションに反映されている。
”火星2020ミッション“の概要
- 目的 :「パーセビランス・ローバー」で火星古代の生命の痕跡を調査し、岩石・土壌のサンプルを地球に持ち帰ること。
- 打上げ:2020年7月30日、ケープカナベラル空軍基地からULA(United Launch Alliance)のアトラスVロケットで出発
- 着陸 :2021年2月18日、火星ジェセロ・クレーターへ
- 期間 :少なくとも火星の6ヶ月から1年間(地球の687日に相当)
- 技術試験:火星大気中でヘリコプターの飛行試験を実施
「パーセビランス・ローバー」
「パーセビランス・ローバー」はNASAのジェット推進研究所(Jet Propulsion Laboratory)が製作した探査機で、長さ3 m以上ありNASAがこれまで作った火星探査機の中で最大で最も重い。
最初の火星探査機「ソジャーナ(Sojouner)」は1997年に着陸したが、大きさは電子レンジくらい、次が2004年着陸の「スピリット(Spirit)」と「オポチュニテイ(Opportunity)」でこちらはゴルフカート位の大きさ、それから2012年「ゲイル・クレーター(Gale Crater)」に着陸した「キュリオシテイ(Curiosity)」はほぼ自動車のサイズ。そして2021年に着陸して微生物生存の痕跡を探る「パーセビランス」へと続いている。
「パーセビランス・ローバー」には、ロボット・アームの先端ターレット部に、岩石・土壌採取用ドリル、有機物を調べる最新の[SHERLOC/生命存在環境探査装置]、岩石、土壌の組成を調べる「PIXL/X線化学分析装置」など7個の生命痕跡探査用の計測機を搭載している。
火星の岩石・土壌採取は「キュリオシテイ」では、ドリルで岩石を粉末状にし搭載の計測機器で解析したが、「パーセビランス」では、岩石をドリルでチョーク大にカットしてサンプル・チューブに収め、地球に送る。1本のサンプル・チューブに9回分のドリル・サンプルを入れ、チューブは長さ50 cm、43本が用意されている。岩石・土壌を採取したサンプル・チューブは、後日行われるミッションで回収され、地球に持ち帰る。
「パーセビランス・ローバー」には19個のカメラが搭載されていて、これまでよりずっと精緻な火星の画像を収集できる。これとは別に大気圏突入、降下、着陸時の撮影用カメラは4台あり、詳細を地上で把握できる。また大気圏突入後に分離される「バック・シェル」にはパラシュート展張を確認する3台のカメラがあり、「降下ステージ」には降下中の「ローバー」を監視するカメラ1台がある。
電源は、ローバー後部に搭載する重さ45 kgの発電機。これは米エネルギー省(DOE)が開発した「多目的ラジオアイソトープ熱発電機 /MMRTG=Multi-Mission Radioisotope Thermoelectric Generator」である。発電はプルトニウム238 (plutonium 238)、重さ4.8 kg,、の自然崩壊熱を利用し110ワットの電力を連続的に発生する。「MMRTG」の発電能力は14年以上持続するので今回のミッションには十分だ。

図2:(NASA/JPL) 「パーセビランス・ローバー」は6輪車、全体の重さは1,025 kgで、ロボットアームとその先端の重さ45 kgのターレットを含む。長さ3 m、幅2.7 m、高さ2.2 m。搭載する7個の計測機器の合計の重さは59 kg。
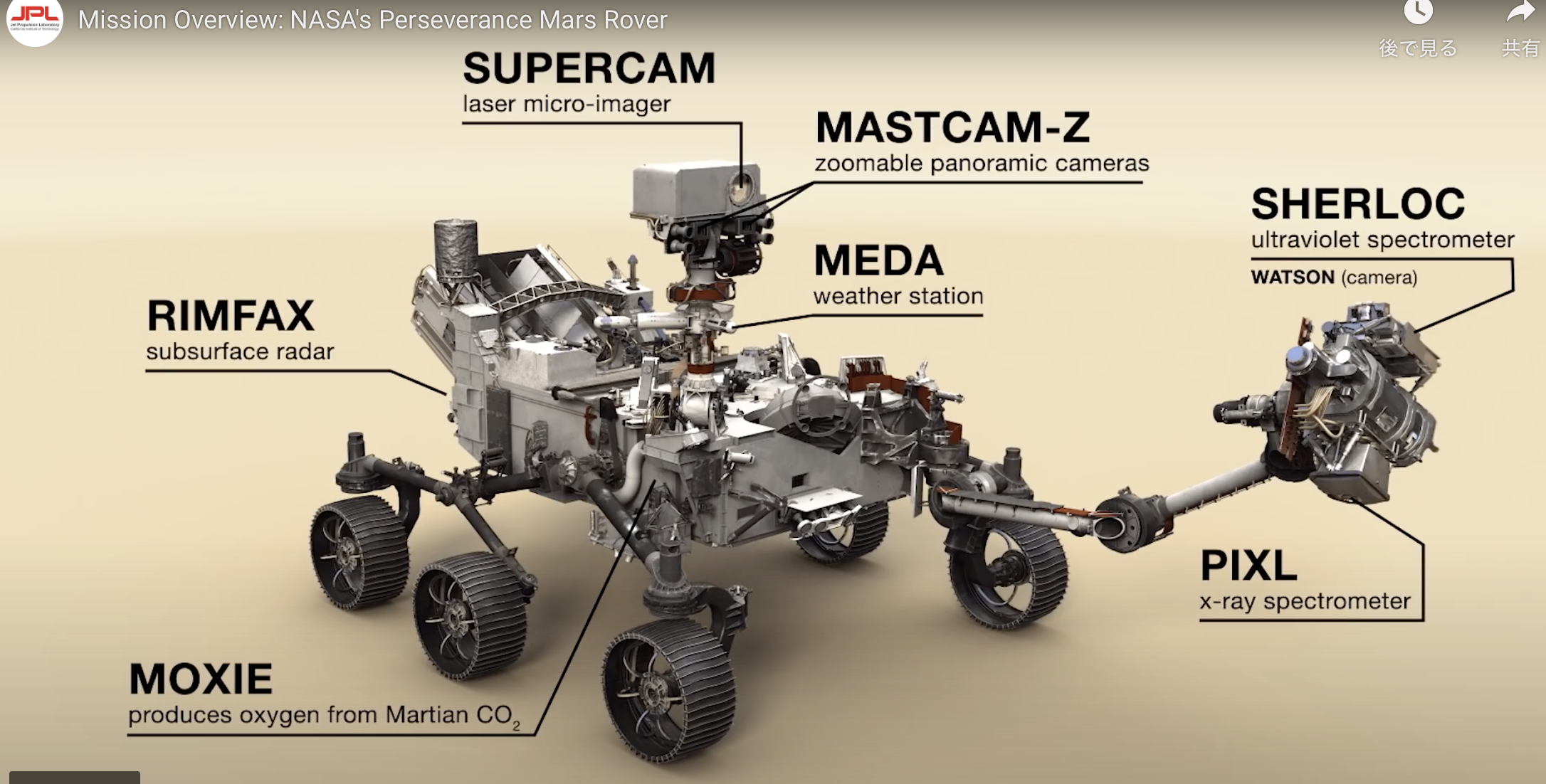
図3:(NASA/JPL)搭載機器の名称と位置。ロボットアームは長さ2.1 m、先端のターレットには地中岩石の微生物痕跡を採集するための「SHERLOC」・大型の穿孔ドリル、カメラ類が取付けられている。
「図3」に記載されている各装置類の略号、主要任務、製作組織は次の通り。
- 「MASTCAM-Z」: Mastcam-Z高さ2 mのマストに取付けた双眼鏡型ズーム・カメラ、高速で遠距離の3D画像、ビデオ撮影を行う。アリゾナ州立大学製。
- 「MEDA」: Mars Environmental Dynamic Analyzer、天候、気象、風速、ダストなどの情報を収集、将来の有人活動の資料にする。スペイン宇宙生物研究所製。
- 「MOXIE」: Mars Oxygen In-Situ Resource Utilization Experiment、大気中の炭酸ガスから酸素を抽出し、将来の有人活動とロケット燃料への利用の可能性を開く。マサチューセッツ工科大(MIT)製。
- 「PIXL」: Planetary Instrument for X-ray Lithochemistry、強力なX線で岩石と土壌を照射、その反射光で化学組成を分析、「SHERLOC」と協力して生命の痕跡を調査する。NASA ジェット推進研究所(JPL)製。
- 「RIMFAX」: Radar Imager for Mars’ Subsurface Experiment、「ローバー」後部に取付ける地中探査用レーダーで、高解像度で地層や氷層の構成を調べる。ノルウエイ・オスロ大学製。
- 「SHERLOC」: Scanning Habitable Environments with Raman & Luminescence for Organic & Chemicals、ロボット・アーム先端の「PIXL」の近くに取付けられ、有機物分子とミネラルの存在を検知する装置。地表面に紫外線レーザー光をフラッシュさせ、反射光の違いで有機物、ミネラルを分析する。受感カメラは「WATSON」と呼ばれるが[Wide Angle Topographic Sensor for Operations and eNgineering]の略。NASAジェット推進研究所(JPL)製。
- 「SUPERCAM」 :SuperCam、マストの[MASTCAM-Z]の頂部に取付けた岩石・土壌の分析用のパルス・レーザー・カメラで、7 m以内にある目標岩石の化学組成と硬度を調べる。レーザー光のスパークで岩石表面を10,000 ℃に加熱、発生するプラズマから化学組成を分析する。ロスアラモス国立研究所とフランスの[IRAP]・スペインの科学革新省(MICINN)などが協力して製作。
「パーセビランス」には将来の有人探査のための装置を数種搭載している。
- 着陸システムの一部として装備する「Terrain-Relative Navigation System/地形追従航法装置」がそれだ。これは着陸降下中に地形をモニターし自動的に正しい着陸点に着陸機を向かわせるシステムで、将来の月や火星への有人着陸に有効なシステムとなる。
- 「パーセビランス」ローバーの自動操縦システムは、これまでのローバーが地球との連絡が可能な時間だけしか運転できなかったのに比べ、自動化の進歩でずっと長時間走行ができる。このお陰で科学データの送信が早まり、探査量を増やせる。
- 「MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment/火星酸素活用実験装置)」は火星の二酸化炭素大気から酸素を抽出し、有人探査の呼吸や、ロケットの燃料として利用する技術を調べる。
- 「MEDA(Mars Environmental Dynamic Analyzer/火星環境動的解析装置)」は火星の天候、表面の砂嵐の情報を収集する装置で、有人探査の助けになる。
- 「MEDLI2 (Mars Science Laboratory Entry, Descent and Landing Instrumentation 2/大気圏突入、降下、着陸計器2)」パッケージは、これまでの火星降下システムの改良型で、今後の有人着陸システムの基本となる装置である。
「ジェゼロ・クレーター」
着陸予定地点の「ジェゼロ・クレーター」は、火星の赤道のすぐ北、イシデイス・プラニシア(Isidis Planitia)]の西にある直径45 kmの巨大な、天体の衝突痕で35億年前までは水が流入していたと見られる。この古代のデルタ域には微生物の痕跡が残る可能性が高い。
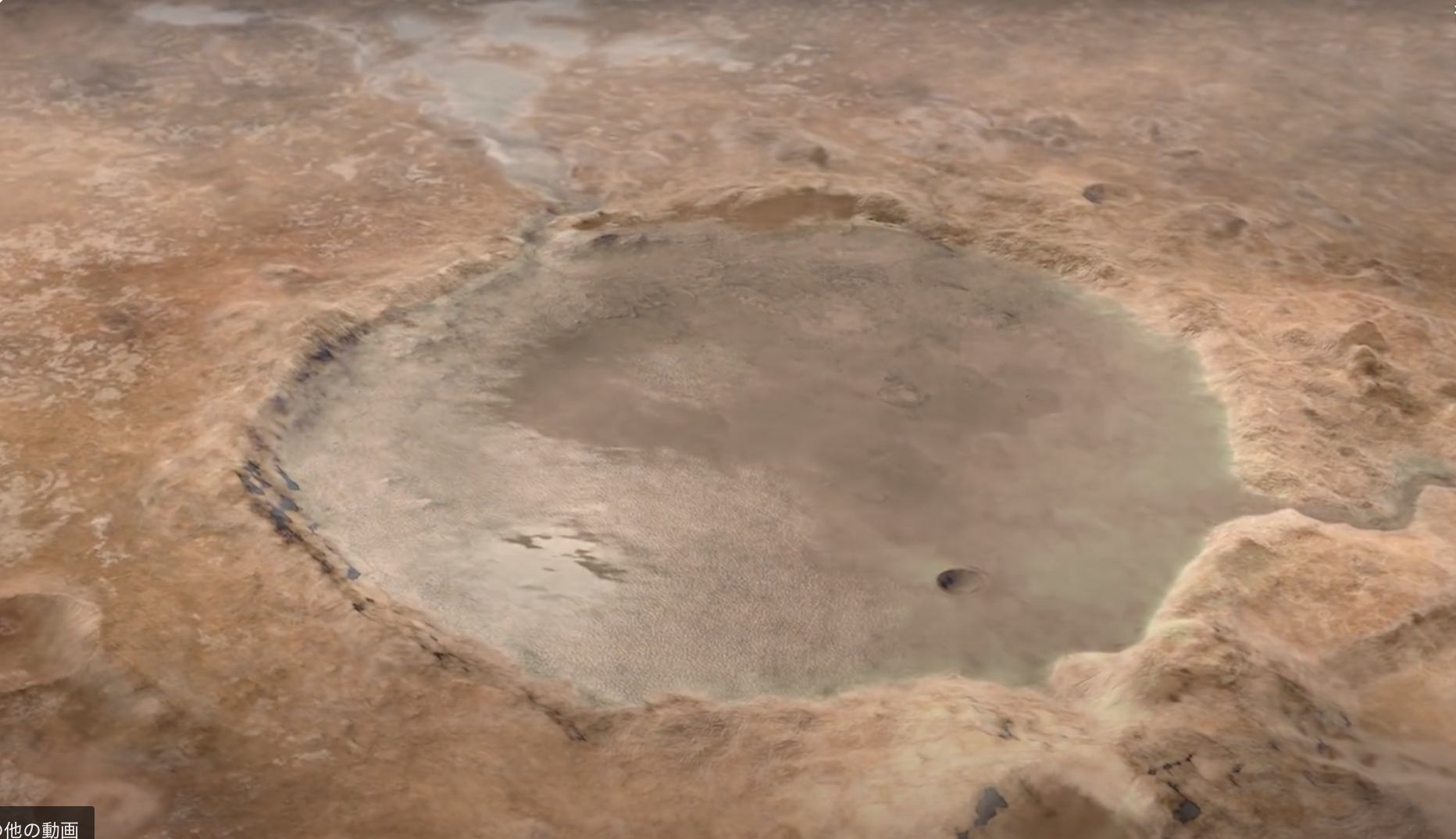
図4:(NASA/JPL) 現在の「ジェゼロ・クレーター」。隕石の衝突痕で直径はおよそ45 km。探査機「パーセビランス・ローバー」の着陸地点は、写真の上左の古代河川の流入箇所にできた三角州の砂丘。

図5:(NASA/JPL) 古代(35億年前)の「ジェゼロ・クレーター」の想像図。大量の水が左上の川から流入し、右から低地に流れている。
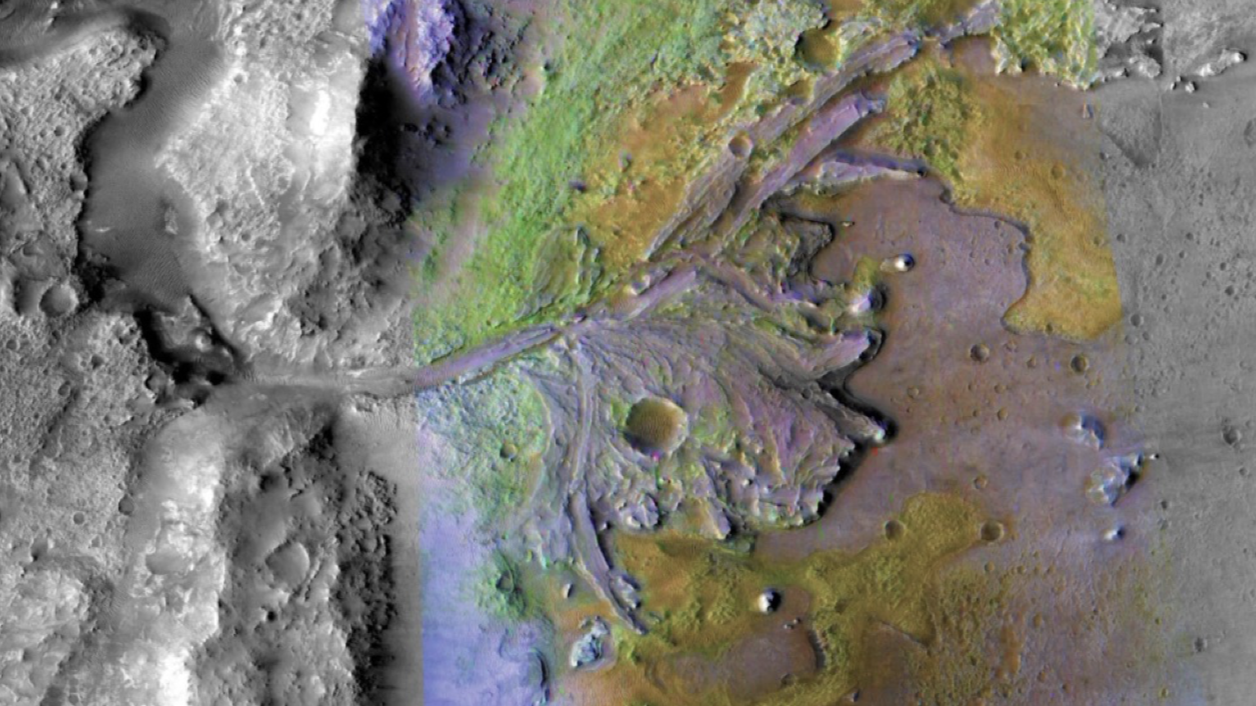
図6:(NASA) 着陸地点は「ジェゼロ・クレーター」上右にあるデルタ三角州で、すぐ近くには急斜面の絶壁が連なっている。
搭載ヘリコプター「インジェニュイテー(Ingenuity)」
「インジェニュイテー」は重量わずか1.8 kg、ジェット推進研究所では、ライト兄弟が飛ばした初の動力飛行機「フライヤー」に相当する火星初の動力飛行機だと言っている。
「インジェニュイテー」は技術実証機で、直径4 mの炭素繊維複合材で作った2重反転ローターで回転速度は2,400 rpm、地球上の普通のヘリコプターの8倍の速度でローターを回す。最新の太陽電池、バッテリー、アビオニクス、センサー、カメラ、通信装置などを搭載している。
火星の環境は大変厳しく、「ジェズロ・クレーター」では夜間は -90℃まで下がる。空気はは大変薄く地球の大気の 1 %の密度しかない。一方重力は地球の3分の1。これらを考慮して「インジェニュイテー」は作られている。
地球との直接通信は難しいので自律飛行をする。撮影したデータなどはローバー経由で地球に送られる。
「インジェニュイテー」は「パーセビランス」ローバーの下部中央に折り畳んだ状態で取付けられて火星に着陸する。着陸後取り下ろされて展張し、暖められ、太陽電池が充電され、1か月以内に飛行を始める。

図7:(NASA/JPL) ヘリコプター「インジェニュイテー」は、「パーセビランス・ローバー」の胴体下面のパネルに取付けられる。

図8:(NASA/JPL) 搭載ヘリ「インジェニュイテー」は重量1.8 kg、高さ50 cm、ローターは2重反転で直径は1.2 mで高速回転する。胴体部は13.6 x 19.5 x 16.3 cmの箱型で、4本の脚で支えられる。電源は頂部にあるソーラーパネルで集電、リチウム・イオン電池を充電、1日当たり90秒の飛行ができる。胴体下面にカメラ2個(カラーと白黒)が付いている。
火星とは
ここで火星の様子を簡単に述べる。
探査機「パーセビランス」が到着する2021年2月18日の火星は、地球から電波/光が届くまで10.5分要する位置にある。
「パーセビランス」の活動期間は、少なくとも火星の1年間、地球の時間で687日以上をジェゼロ・クレータ」で予定している。
火星は、地球のほぼ半分の大きさ、月の2倍のサイズで、表面は砂漠に覆われている。火星の面積は地球の陸地部分と同じくらいの広さ。重量は地球のほぼ10 %で重力は地球の38 %である。
火星の軌道は、地球の軌道の約1.5倍の楕円軌道で、太陽からの距離はほぼ230万km (地球の太陽周回軌道は150万km )。
火星の1年、つまり太陽を1周する期間は地球の687日に相当する。
火星の1日は、つまり自転速度、は地球より僅かに長い。
火星表面の大気圧は、地球の1 %しかない。
火星表面の気温は、極地方の夜間で -53 ~ -128℃、赤道の日中で27℃、の範囲である。
プログラム・コスト
NASAは、”火星2020「パーセビランス」ミッション“の開発、打上げに約24億ドル(2,600億円)の費用を投じた。そして、今後着陸してローバーを稼働させ2年間(地球時間)運用するのに3億ドル(320億円)要する予定。
これに搭載ヘリ「インジェニュイテー」の製作、運用コストが加わる。
打上げ
地球も火星も太陽の周囲を回っているが、地球の軌道は火星より内側にあり、26ヶ月毎にお互いが最も接近する。この機会を狙って、打上げ準備の完了具合、火星までの飛行時間(約6~7ヶ月)などを考慮して最適の「打上げ期間 (launch window)」が決まる。この結果が2020年の7月22日から8月11日の間で、実際の打上げは7月30日であった。
“火星2020「パーセビランス」ミッション“ は、ULA (United Launch Alliance)のアトラス(Atlas) Vロケット541号機で、フロリダ州ケープカナベラル空軍基地第41号発射台から打上げられた。
アトラスVは2段式ロケットで、” 541 “の意味は、ペイロード・フェアリングの直径が5 m、1段目に固体燃料ブースターが4本付き、2段目セントールのエンジンは1基、であることを表している。ロケット全体の高さは60 m。
「パーセビランス」宇宙機(ペイロード)は、2段目セントールの先端のフェアリング内に取付けられ、打上げ後50~60分に2段目から分離、火星への長い航海に入る。打上げ後70~90分から地上との交信が始まる。

図9:(NASA/JPL/ULA)アトラスV打上げロケットは、これまで15年間、600回以上の打上げに成功している。構成は、下から「アトラスVブースター」(薄茶色部)、「中間段」(白色)を挟み、上部の太い部分は「ペイロード・フェアリング部」で、内部に「セントール(centaur)段」と「ペイロード」部がある。「ブースター」のエンジンはロシアNPO Energomash製の[RD-180]推力86万Lbs 1基(燃焼室は2個ある)。「ブースター」の周囲にはエアロジェット・ロケットダイン(Aerojet Rocketdyne)製の固体燃料ブースター(SRB)推力38万Lbsが最大5本(今回は4本)装備される。2段目の「セントール段」には同じ会社が作る[RL10]エンジン推力22,900 Lbsが1基付く。
「パーセビランス」宇宙機
「パーセビランス」宇宙機は火星まで5億kmの距離を約7ヶ月・213日かけて巡航飛行する。巡航中「パーセビランス」は、「エアロシェル(aeroshell)」と呼ぶカプセル内に収められる。「エアロシェル」は、地上との通信装置がある「クルーズ・ステージ(cruise stage)」、降下用パラシュートを収める「バック・シェル」、着陸時にローバーを降ろすスカイ・クレーン付きの「降下ステージ」、折り畳まれた「パーセビランス・ローバー」本体、そして大気圏突入時に生じる高温の摩擦熱を防ぐ「ヒート・シールド」、で構成されている。

図10:(NASA/JPL) 「パーセビランス・ローバー」と「降下ステージ」を、火星大気中を降下する間保護するために上下を「エアロシェル」と呼ぶカプセルで覆う。手前白色が「バック・シェル」、この頂部に降下用パラシュートが収納される。奥の黄銅色コーンは「ヒート・シールド」、降下中高温の摩擦熱から「ロ―バー」を守る。いずれもロッキード・マーチン社製。「ヒート・シールド」は「PICA=phenolic impregnated carbon ablator」と呼ぶタイルで覆い1,300 ℃の高温に耐えられる。
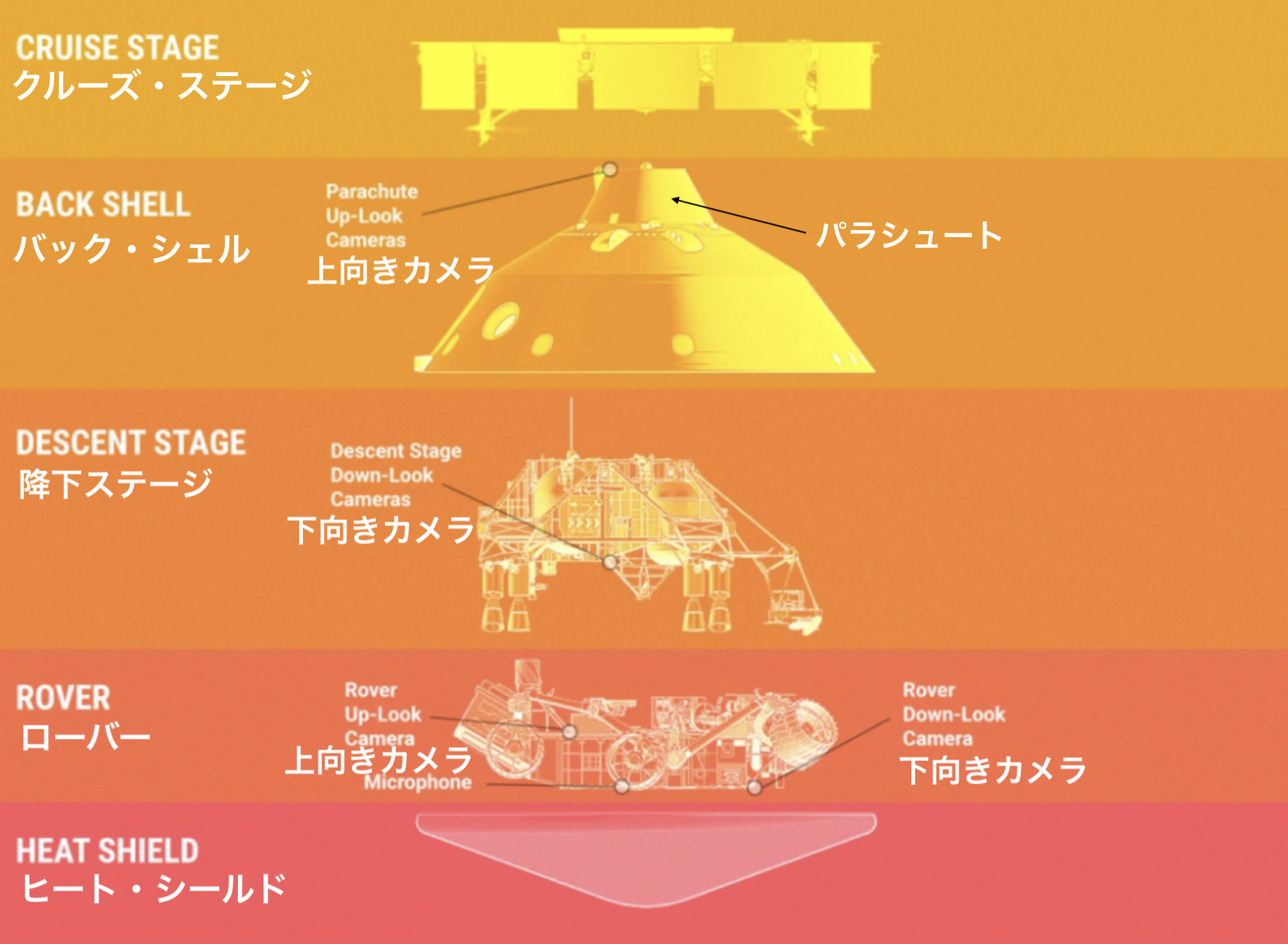
図11:(NASA/JPL) 「パーセビランス」宇宙機の構成。「図1」に示す想像図の中身を示したもの。
大気圏突入、降下、着陸
打上げ後火星までの巡航飛行253日間の終わりの45日目から火星への進入フェイズに入る。この間に必要があれば2回の軌道修正をする。
大気圏突入、降下、着陸 (EDL=entry, descent and landing) は火星大気圏頂部で始まり、突入時の最高時速は約19,500 km/hr になる。突入後75秒後には大気との摩擦でヒート・シールド外板の温度は最大で1,300℃に達する。
「パーセビランス」の着地点は「ジェゼロ・クレーター」の上左にある古代河川の流入三角州の小さな隕石衝突クレーター脇の砂丘。「ローバー」を正確に目標着地点に誘導するため新装置「Range Trigger and Terrain-Relative Navigation (パラシュート展開のタイミング指示、および地形追従航法装置)」が使われる。
パラシュートは開傘すると直径が21.5 mあり、大気圏突入後約240秒、高度約11 km、速度約1,500 km、で開く。開傘後20秒過ぎると「ヒート・シールド」が分離、落下する。
パラシュートが取付けられている「バック・シェル」は「ヒート・シールド」分離後約90秒後に分離する。ここで「降下ステージ」と「ローバー」は高度約2,100 mになる。
この辺りで「降下ステージ」に付いている8個の推力調整可能なロケット/スラスターを噴射、時速300 km/hrに減速し、地表から高度20 mで時速2.7 km/hrにする。
ロケットを噴射しながら降下中に「Terrain-Relative Navigation (地形追従航法装置)」が作動し始め、[「降下ステージ」+「「ローバー」]を安全な着陸地点に誘導する。
「Terrain-Relative Navigation (地形追従航法装置)」が「降下ステージ」を目標地点の上空20 mに誘導したら、スカイ・クレーンが作動を始める。長さ7.6 mのナイロン・コードが「ローバー」を吊るし、地上に降ろす。着地が確認されたら「降下ステージ」は、ナイロン・コードを巻き戻して飛び去り、遠くに落ちる。
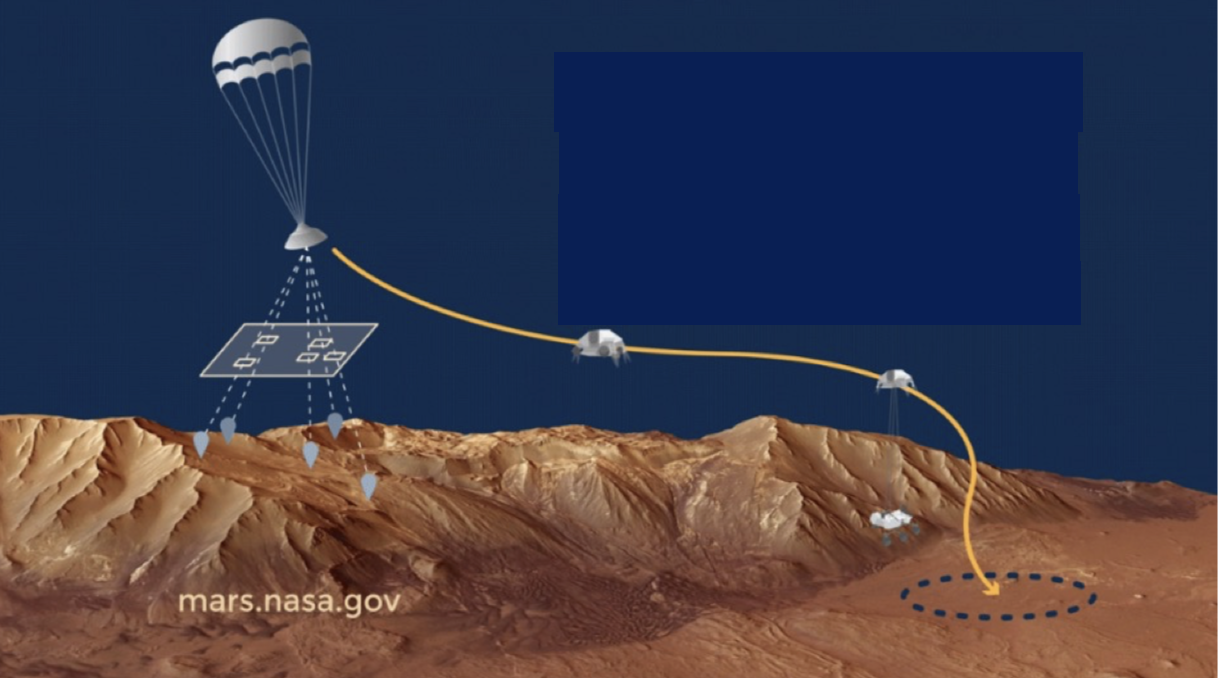
図12:(NASA/JPL) 「Terrain-Relative Navigation System/地形追従航法装置」の概念。降下中に地形の写真を撮影、内蔵する地図と比較、必要なら航路を修正、着地する。

図13:(NASA/JPL-Caltech) 「パーセビランス・ローバー」の着陸は、2012年の火星探査機「キュリオシテー」の着陸とほぼ同じ方法。図の上が「降下ステージ」で2個ずつ纏めてある8個のロケットから噴射・減速し、クレーンで「ローバー」を静かに着地させる。着地すると「降下ステージ」は吊り下げ用ナイロン・コードを巻き取り上昇し、飛び去る。
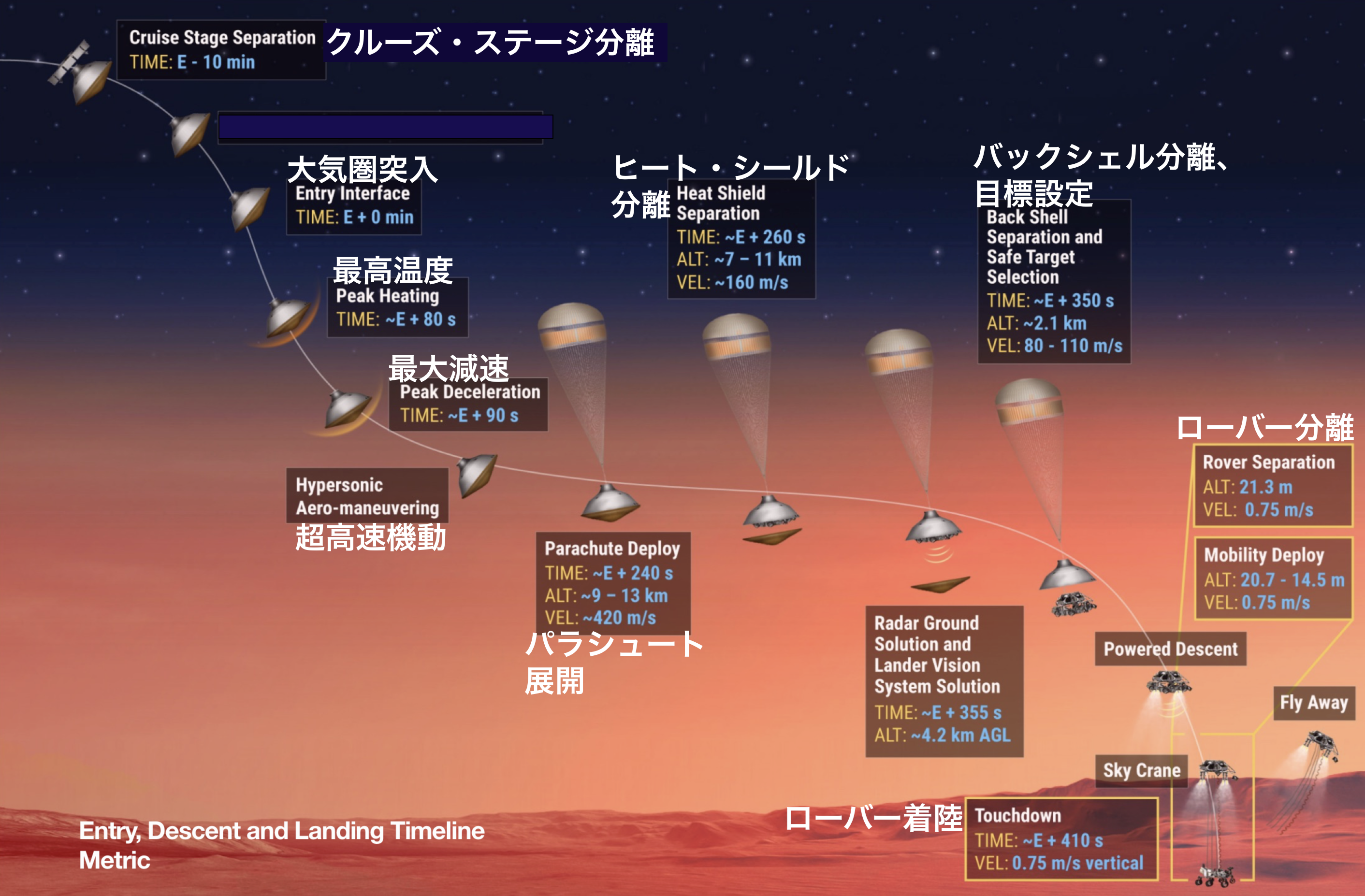
図14:(NASA/JPL-Caltech) 「パーセビランス・ローバー」宇宙機が「クルーズ・ステージ」を分離してから大気圏突入、パラシュート展開、ヒートシールド分離、バック・シェル分離。降下ステージ+ローバーが高度20 mに降下、ローバーの着陸、を示した図。
―以上―
本稿作成の参考にした記事は次の通り。
NASA Aug.22, 2020 “Follow NASA’s Perseverance Rover in Real Time on Its Way to Mars” by Editor Tony Greicius
NASA June 2020 “Mars 2020 Perseverance Launch Press Kit”
Atlas V-United Launch Alliance