2020年1月22日の第1回で紹介した様に、LiDARは、Light Detection and Ranging (光検出と測距)もしくはLaser Imaging Detection and Ranging (レーザー画像検出と測距)の略で、光を用いたリモートセンシング技術の一つである。今回は、自動車関連分野に関する応用で、自動運転のセンサーとしての日本およびアジアのLiDAR開発企業の紹介を行う。中国では、何社かのスタートアップ企業が生まれて来ており、多くの新製品も市場に投入されている。今回でLiDARの開発と応用のテーマでの最終回となる。これまで連載された拙著をお読み頂いた方には御礼申し上げます。
(As explained in the reports dated January 22 and April 11, LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remote-sensing technologies applying optics. In this report, LiDAR vendors in Japan and China are introduced, and their technologies are mainly adopted by the autonomous driving. Many start-up companies are popping up in China, and not a few new products are introduced to the market. This report is the last of the LiDAR series, and would like to express my sincere gratitude to those who have read through this series.)

1. パイオニア
LiDAR開発の取組み
パイオニアのHPに依れば以下の通りである。
(1)レベル3以上の自動運転の実現: 自動車メーカー各社は、自動運転に対してミリ波レーダーやカメラを採用しているが、天候や物体の性質に影響を受けやすく、自動運転の実現にはさらに精度を高めることが求められている。レベル3以上の自動運転では、障害物を正確に回避すること、自車位置を正確に測位することなど周辺の正確な距離情報が求められている。3D-LiDARを活用することで従来の単眼カメラやミリ波レーダー、2D-LiDARでは困難だった立体的で正確な物体検知が可能になり、自動運転に求められる走行レーンレベルでの自車位置推定、それらの情報を含んだ自動運転用地図の生成・更新が実現できる。
(2)小型/軽量、低コスト、高信頼性を実現した3D-LiDAR量産化
LiDARの概念はレーザーが発明された1960年代に発表されており、地形や気象などの分野で活用されている。しかし、従来は飛行機にレーザースキャナーを装着して3D点群モデルを作成するタイプが主流で、自動車で利用するには「大きい・重い・高コスト」という課題があった。LiDARを自動運転で使用できるようにするためには、性能を実現することはもちろん、車両搭載用のコストを実現することと、車両のデザインを損なわず装着を可能にする小型化が同様に求められ、以下の二つの技術が重要である。
・「MEMSミラー方式」で車載をより現実に: 従来の3D-LiDARは、レーザー光を広範囲に照射するためにモーターなどの駆動部が必要であり、そのため小型化・軽量化が難しく、部品点数も多く生産コストがかかるという課題がある。そこで、駆動用モーターが不要な「MEMSミラー方式」を採用し、3D-LiDARの大幅な小型化・軽量化に取り組んでいる。
・独自の光学技術とノウハウで量産化を可能に:自動車は、熱や振動、塵など精密機器にとって非常に過酷な環境である。パイオニアは車載用CDプレーヤーなどを手がけてきた経験があり、長年に渡って積み重ねてきた光学技術は、3D-LiDARの開発に活かされ、耐久性とともに高い精度と信頼性へとつながる。実用化する上でコストダウンも欠かせない要素である。先行したDVDのコストダウンの実績を応用する等で、汎用部品の活用や量産を見据えた新規部品の開発を始め、技術の共通化と量産体制により、大幅なコストダウンの実現と量産化を目指している。
(3)4タイプのセンサーと2種類のスキャン方式: 従来の3D-LiDARは、1台のセンサーで360°をカバーする「マルチレーザー出力」が一般的であった。マルチレーザー出力は、汎用性が高いという特徴があるが、自動車への搭載を想定した場合に装着方法やデザインの自由度が低く、死角が発生するなどの課題を秘めている。そこで、車載アプリへの最適化を優先した「シングルレーザー出力」を採用し、用途やシステム構成に合わせて最適なセンサーを選択できるように、4タイプの3D-LiDARをラインアップした。
道路上の落下物などをいち早く検知する前方用の「望遠LiDAR」、周囲の車両や歩行者を検知する「標準LiDAR」、周辺の建物や自車位置を検知する「準広角LiDAR/広角LiDAR」の4種類で全方位を完全カバーしている。望遠・標準・準広角LiDARは、ラスタースキャン方式のMEMSを採用。一方で、広角LiDARは、近距離・広範囲のセンシングが可能なヘリカルスキャン方式のMEMSを採用。
(4)独自の信号処理技術により受信性能を向上: レーザーは雨や雪などの天候の影響を受け、距離が遠くなると精度が低下。この問題に対して地デジチューナー開発で培ったデジタル信号処理技術を応用し、送受信時に発生する信号に処理を加えることにより、より高い精度と安定性を実現。さらにレーザーは、黒色など反射強度の弱い物体の検出が難しいという欠点があるが、独自のデジタル波形信号処理技術によりノイズの除去精度を上げる技術を開発。
(5)ナビ技術×地図のリアルタイム連携:サイバーナビや楽ナビなどで培ってきたナビ技術と地図開発の経験を活かし、地図との連携などのソフトウエアも含めてトータルで3D-LiDARの開発を行っている。自動運転では、高度な自車位置推定に加え、車線や車幅、勾配や標識などの情報を含んだ高精度な自動運転用地図が必要不可欠。ダイナミックマップなどの地図開発も含め、自動運転に最適化された3D-LiDARシステムを提案できる。
2020年代に3D-LiDAR量産開始
2018年、MEMSミラーを採用した「ラスタースキャン方式」の3D-LiDAR 2018モデルを開発。今後の目標は、一般道でレベル3以上、クルマが運転責任を持つレベルの自動運転を3D-LiDARで実現することである。実用化に向けた動作検証を行うとともに次世代モデルの開発、ニーズに即した柔軟なシステム構成への対応、量産を見据えた新規部品の開発と低価格化を進め、2020年代の量産化を目指している。
CES 2020での新製品発表の内容
米国ラスベガスで開幕した「CES 2020」において、パイオニアの子会社であるパイオニアスマートセンシングイノベーションズ(PSSI)は、500 mの遠距離計測が可能な次世代3D-LiDARセンサーの試作機を出品した。PSSIは、キヤノンとともに自動運転レベル3(第4回にて解説)以上の実現に不可欠とされる3D-LiDARセンサーを共同開発。出品した次世代3D-LiDARセンサーは、両社のコア技術をベースに韓国SKテレコム社の送受信技術を加えることで計測距離を大幅に伸長させた波長1550nmのモデルで、500 mの遠距離かつ高解像度な計測を実現する。パイオニアのMEMSミラーを用いたスキャン技術とキヤノンの光学技術を用いた量産モデル(波長905nm)も出品している。
2020年秋から量産を開始するモデル(準広角短距離用、中距離用、長距離用、広角タイプ)に、この次世代遠距離モデルを加えることで、セキュリティ、交通監視用途や、路側センサーなどのモニタリング用途、自動運転車両における遠距離計測など、さまざまな市場、顧客ニーズに対応。また、各LiDARセンサーを使用して物体検知や自車位置推定などを高精度に行えるソフトウエアも開発、提供が可能となる。PSSIは今後、パートナー企業と技術を持ち寄り、次世代3D-LiDARセンサーのさらなる高性能化、小型化およびソフトウエアの開発を進め、2021年以降の実用・商用化を目指す。

図1 (出典:Response.20th) パイオニアがCES2020に展示した3D-LiDAR
2. 三菱電機
三菱電機の高精度認識技術
三菱電機は、カメラ、LiDAR、ミリ波レーダーの3種類の車載センサーによる情報から、信頼性の高い情報を取捨選択して、周辺環境の認識精度を高める技術を開発。濃霧や豪雨など、従来手法では車両周囲の物体を認識できなかった環境においても、正確に認識し自動ブレーキを作動できることを実験で確認した。 開発した手法は、3種類のセンサーが備える一長一短の特徴を踏まえ、重視する情報を環境に応じて動的に変える。一般にカメラは、車幅など寸法や形状の認識には優れるが悪天候時の認識に劣る。LiDARは、位置の検知精度は高いが霧に弱い。ミリ波レーダーは、速度や距離の検知精度は高いが位置の認識精度が低い。既存の手法では、3種類のセンサーによる情報の重み付けは固定的であった。
今回の技術は、車両が前進し前方の物体に接近する場合を想定している(図2)。各センサーで、位置、速度、大きさなど、周辺の対象物に関する数種類の情報を100 msごとに推定する。さらに100 ms前に推定した情報の正確さを、近づいて認識しやすくなった状況で定量化する。このような3種類のセンサーの正確さを周囲の気象などの環境と関連付け、例えばある条件の濃霧で速度を最も正確に認識できるのがミリ波レーダーであるといった情報を蓄えていく。蓄積した情報から、現在の環境で、位置、速度などが最も正確に認識できるように、3種類のセンサーの情報を動的(100 msごと)に重みづけして統合する。
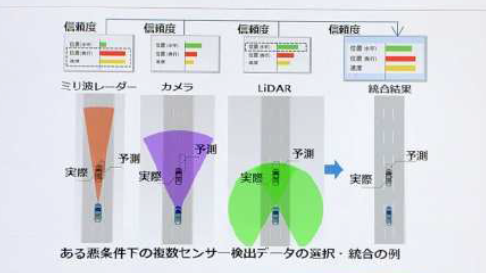
図2 (出典:三菱電機のHP) 3種類のセンサーの情報を動的に重みづけして統合
MEMS式車載LiDARの開発
三菱電機株式会社は、水平・垂直の2軸で走査する電磁駆動式MEMS*ミラーを搭載した、小型で広い水平視野角を持つ「MEMS式車載LiDAR」を開発。自動運転に不可欠なセンサーであり、先行車両や歩行者などの距離や形状を高精度に検知し、高精細な3次元画像を広範囲に取得することができる。小型化・低コスト化による普及を進めることで、安心・安全な自動運転社会の実現に貢献する。
*MEMS:Micro Electronics Mechanical Systemの略。半導体のシリコン基板・ガラス基板・有機材料などに、機械要素部品のセンサ・アクチュエータ・電子回路などをひとまとめにしたミクロンレベル構造を持つデバイスのこと。

図3 (出典:三菱電機のHP) 開発したMEMS式車載LiDAR
新開発のMEMS式車載LiDARの特徴は大まかに分けて2つある。1つは、送信光と受信光のそれぞれを水平・垂直の2軸で走査する電磁駆動式MEMSミラーの開発である。車載LiDARで先行車両や歩行者などの高精細な3次元画像を取得するには、送信光であるレーザーを対象物に照射し、その反射による受信光をより多く集めることが必要になる。そこで求められるのが、光路に設置されるミラーの大型化やミラーの振れ角の拡張だ。新開発のMEMSミラーは、独自構造により面ひずみを抑制する一方で、業界最大級となる7×5 mmサイズと軽量化を両立し、より高い駆動力が得られる電磁方式MEMSの採用で水平で±15度、垂直で±3.4°という広い振れ角を実現した。また、MEMSミラーは半導体加工技術でシリコン基板上に多数個作成されているため量産性に優れている。モーターで駆動させる機械式に比べ、使用する部品点数が少なくより高い耐久性が期待される点もメリットである。
もう1つの特徴は、新開発のMEMSミラーの採用と、光学部品(複数のレーザー光源、光検出器、レンズなど)の最適配置により、LiDAR内部の部品配置の影響を受けてレーザー光が遮光される現象を抑制し、120°という広い水平視野角を確保した光送受信機構である。これにより、高精細な3次元画像を広範囲に取得できるため、搭載車両の前方を走行する先行車両や対向車両、路上横断中の歩行者、信号機、標識などの路側物を適切に検知可能となる。
また、信号処理回路基板や電源回路、光送受信機構の最適配置により、LiDAR本体の小型化も実現した。外形寸法は108×105×96 mmとほぼ10 cm角サイズで、容積は900 ccになる。
今後の開発目標としては、垂直視野角の拡大とさらなる小型化を挙げている。MEMSミラーでは、梁構造の改良により垂直:±6.0°以上という広い振れ角を目指す。併せて、LiDAR自身の性能としても25°以上の垂直視野角を実現し、近距離の車両や歩行者の検知をより容易にすることを目指す。小型化では、容積で350 cc以下を目標としている。
3. 東芝/東芝デバイス&ストレージ(株)
東芝およびそのグループ企業である東芝デバイス&ストレージ(株)はLiDARに関する基礎技術の開発を進めている。
LiDARの測距解像度を改善する計測アルゴリズム技術の開発
LiDARにおいて、長距離測定の解像度を向上させる計測アルゴリズム技術を開発。本技術により、長距離における測距画像の解像度を、東芝グループの従来技術に比べ2倍以上に向上させることに成功。車載向けLiDARでは、長距離を検知する性能が求められており、長距離を測定するには、太陽光などのノイズの影響を低減し、微弱な反射光を検知する必要がある。また、遠方のバイクや歩行者を検知するためには、高解像度な測距画像であることも求められる。
従来は、ノイズの影響を低減する手法として平均化処理が用いられていたが、従来の手法では、長距離になった場合の精度維持や誤検出の除去に課題があった。東芝および東芝デバイス&ストレージ株式会社は、スマート平均化アルゴリズム(Smart Accumulation Technique; SAT)と呼ばれる計測回路技術と距離データの信頼度判断する技術を開発し、200 mまでの長距離を高精度に測定することに成功。SATは、前後のフレーム間の情報を適用して、ノイズ除去、精度向上を達成するもの。さらに、車載向けLiDARに求められる解像度にはさらなる改善の必要があり、SATの性能を向上させた「フレーム間スマート平均化アルゴリズム(Inter-flame-SAT; I-SAT)」を開発し、長距離測距における解像度を改善した。
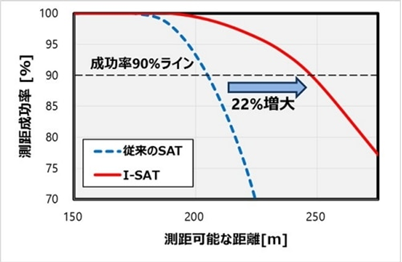
図4 (出典:東芝のHP) I-SAT技術の開発結果
これらの特長を備えたI-SATを用いることで、200 mの長距離における解像度を東芝グループの従来技術に比べ2倍以上改善し、車載向けLiDARに求められる空間分解能0.1°を実現した。同一解像度における測距可能距離は22%増大している。また、実装コストの増加は、従来技術から1%以下に抑えている。当社は今後、本技術のさらなる測距精度向上や実装化に向けた開発を進め、2020年までの実用化を目指す。
レベル4以上の高度自動運転の実現に貢献するLiDAR向け受光技術の開発
LiDARにおいて、ソリッドステート型LiDAR向けに、長距離測定と高解像度を実現する受光技術を開発。LiDARは、レーザーと検出器を回転させることで観測するメカニカル型が主流であったが、小型化・軽量化が難しくコストも高いという問題があり、現在は、半導体技術や光学技術で回転機構部を置き換えるソリッドステート型が増えている。メカニカル型と比較してソリッドステート型は長距離測定・解像度に課題があったが、今般開発した受光技術により、ソリッドステート型において高解像度を実現しながら従来の4倍となる200 mの長距離性能を実証した。本技術は、1台の車両に対して複数のLiDARの搭載が必須とされているレベル4以上の自動運転の実現に大きく貢献する。
ソリッドステート型LiDAR向けの新たな受光技術は、従来困難だった超高感度受光デバイスSiPM*の小型化を可能にし、高解像度と長距離測定性能の両立を実現。SiPMは、微弱なレーザーの反射光を高感度に検出することが可能であり、LiDARの長距離測定に適した受光デバイスである。従来のSiPMでは、一度光を検出した受光セルは一定時間応答ができなくなる物理上の特性があり、もれなく光を検出するためには非常に多数のセルを搭載することが必要であった。今般、SiPM上に受光セルを再起動させるトランジスタを搭載することで、受光セルが応答できない時間を短縮することに成功。これにより、少ないセル数でも効率良く光を検出できるようになり、SiPMの大幅な小型化を実現。小型SiPMを用いることで、限られたパッケージ面積内に多数のSiPMを配列することができ、高解像度化が可能となった。
*SiPM (Silicon Photo Multiplier): 1光子を受けると、100万電子に変換する光検出デバイス
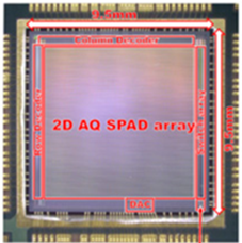
図5 (出典:東芝のHP) 開発したSiPM配列チップ
4. 京セラ
京セラはLiDARセンサーモジュールに関して、開発を行っており、2020年に試作品を出荷し、25年にも量産に乗り出す。LiDARは人がほとんど操作をしない高度な自動運転に不可欠な部品とされ、欧米勢が先行しているが、価格を半額以下に抑えて巻き返す。電機・電子部品の技術を生かしやすく、日本勢が今後、高いシェアを握る可能性もある。もともとは航空機、月面や山地の計測などに利用され、コストが高いが、障害物の検知で使われるミリ波レーダーと組み合わせて、より精度の高い測定が可能である。京セラが開発したのはLiDARと画像センサーを組み合わせたセンサーモジュールであり、MEMS(微小電子機械システム)などの制御技術を生かして100 m先の10 cm四方の障害物を認識できるという。京セラが基幹部品の多くを内製化し、さらに高額なミラーを使わないなどの強みを生かし、価格を50万円以下と現時点の競合の半値以下に抑える。同社の実験によると、競合品に比べて精度が6倍以上高く、LiDAR専業の米ベロダイン・ライダーよりも高精度で安価とみられる。

図6 (出典:京セラのHP) カメラ-LIDARフュージョンセンサ(コンセプトモデル)
京セラのカメラ一体型LiDARの特徴
研究開発本部 次世代基板技術ラボ部責任者 皆川氏に依れば、同社の技術の現状は以下の通りである。
LiDARは距離を測ることはできるが、見えている物体が何なのかを認識することはできない。一方、カメラは、形状と色を区別することが非常に得意だが、画像の影や質感を3次元の物体と間違えてしまうことがあり、2Dと3Dの区別はできない。しかし、この2つを組み合わせることで、どこにあるかを計測し、物体が何であるかを識別できる、本来のイメージ画像を作成することが可能になる。だが、この手法にも課題がある。通常、LiDARとカメラは別々のユニットであるため、表示されるデータを合成してもわずかにずれてしまう(視差と呼ばれるねじれ)。人間の目と脳は、目に見えているものの映像視差を本能的に処理するように進化して来た。しかし機械が視差の無いデータにするためには、コンピュータによるLiDARとカメラのデータの統合・制御が必要となる。クラウドベースのシステムなら可能かも知れないが、実際に統合するには遅延が発生し、車載用には適さない。他社もこの問題に取り組んできたが、スペースや熱などの制約から、LiDARとカメラの視差をなくすことは簡単ではなかった。
そこで京セラは独自技術によりカメラとLiDARを1つのレンズでワンユニットにまとめることで、視差を無くすことを実現。カメラ-LiDAR フュージョンセンサでは、2つのデバイスを1つのユニットにおさめているため、どちらも同じレンズを通し、中心軸(光軸)を一致させることが可能であり、そのため視差が発生しない。カメラデータとLiDARデータを統合させるプロセスが非常に容易になり、遅延がなく、車載用として活用が可能である。(尚、このLiDARの分解能は0.05°であり、大手のベロダインの製品の分解能0.08°を上回り、世界最高レベルとしている。5 m先なら1 cm、100 m先で9 cmの高さの物体を検知可能である。)
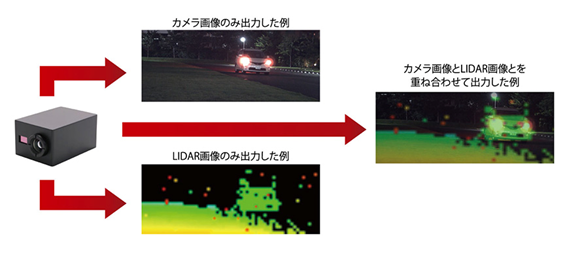
図7 (出典:京セラのHP) カメラ-LiDAR フュージョンセンサの出力例
さらに、もう一つの課題である耐久性に対しても、ミラーを回転する方式では無く、京セラのセラミック技術を駆使したMEMSミラーを用いた方式を開発。これにより、実際の走行環境での耐久性が大幅に向上し、自動運転に最適な製品に進化した。京セラは、このユニットを次世代自動運転システムに導入することを計画している。また、建設機械やロボットなどのモビリティのほか、人や物を認識するセキュリティシステムなど、さまざまな分野での活用も期待されている。
5. コニカミノルタ
コニカミノルタが開発するLiDAR製品の特長、応用等は以下の通りである。
(1)独自のレーザー投受光技術×広域走査技術により高精度かつ広画角なスキャンを実現
3D-LiDARは、本体から照射するレーザー光により対象範囲に存在する物体の有無や対象までの距離を測定する仕組みである。LiDARからの投光が測定対象物で反射し、光が戻ってくるまでの時間差により物体の3次元画像を取得し、毎秒10フレームのリアルタイム測定が可能であり、反射光の強度情報も取得できる。
図8 (出典:コニカミノルタのHP) コニカミノルタの3D LiDARの外観
独自のレーザー投受光技術と走査技術により、検出可能領域は水平画角最大120°の広画角を実現。垂直方向にも24ライン分を取得し、高い分解能を実現している。遠方のスキャンでもライン間の隙間が生じない広域走査技術で、データの抜けがない高精度な測定が可能。50 m先の人物、100 m先の車両を検知でき、最大検出距離は約200 mで、広範囲をカバーできる。
(2)3Dリアルタイム情報を取得可能なこと
3D-LiDAR、形状や物体の識別だけではなく動体認識も可能。さらに毎秒10フレームのリアルタイム検出により、複数の人物間の距離測定、歩く速度などの計測が可能。蓄積した行動データの解析から、歩行者や自動車の行動パターンを割り出し、不意な飛び出しの予測、不審者の検知なども行える。3D測定により真正面からだけでなく真上からなど、3D空間で自由に視点を変えて情報を見ることができるのも特長である。
(3)リアルタイム検知を自律走行車開発に活用、センサ・フュージョンで用途拡大
リアルタイム検知の特長を活かせるのが自律走行車の開発である。自律走行においては、自車の位置特定と共に周囲の他車両や歩行者、障害物の検知が必要である。3D-LiDARは、ジャイロセンサー(ブレ補正)やGPS(位置情報)など他のセンサーと組み合わせた形で、リアルタイムで高精細な三次元情報を取得し、安全走行のための歩行者検知や、自律走行向けの地図作成を高い精度で実現。さらに道路の白線とアスファルトを区別することも可能である。
また、自律走行では夜間でもヘッドライトや街灯などの外乱光の影響をなるべく受けずに、自動車や人の動きを正しく検知することが求められる。コニカミノルタの3D-LiDARは照射した光線が同じ軌道(軸)を通って戻る高い精度の同軸光学系の技術を採用することで、太陽やヘッドライトなどの外乱光を極力排除しており、警備などの屋外用途でも高い品質を達成している。また戻ってくる光の強度の測定により、道路の白線とアスファルトの区別等、対象物の区別することも可能である。リアルタイム検知と組み合わせることで、建機や物流搬送機、移動ロボットなど様々な環境認識センサーとしての応用の可能性がある。
(4)人物行動解析をスポーツやマーケティングに活用
広域警備、マーケティング、スポーツなどでは行動解析に対する活用が見込まれる。例えば警備では、対象物の大きさの判別だけでなく、動体解析データを組み合わせることで、より精度の高いセキュリティシステムの構築が可能となる。また、店舗の棚を監視することにより人気の商品を可視化するなどが考えられる。
スポーツでは、例えばサッカー場に複数台の3D-LiDARを設置することにより、選手の動きをリアルタイムに把握することが可能となり、各選手の走行速度や移動距離などの詳細情報を取得できるほか、選手の行動エリアをヒートマップで表すなど、より高度な戦術策定や怪我の防止も期待できる。
(5)3D形状計測を物流や建設現場に活用
広範囲を一度に計測する3D形状計測は設備の監視や土木・建設現場の監視などに活用できる。形状によって対象物を特定することで、危険物か否かの確認や盗難の防止などに役立てられる。また、土木・建設現場などでは工事の進捗の確認、作業の危険予知や事前検証などへの活用も可能。
国内・海外市場における協業に関しては以下の通り。
警備保障会社のALSOKは高精度な検知性能を有する3D-LiDAR(コニカミノルタ製)の販売を開始(2018年7月より)
背景・目的は、高度な安全性が求められる施設での警備強化や、多くの人が集まる場所での安全対策、繁華街を中心とした街頭犯罪への対策など、セキュリティレベルの向上が社会的な課題となっていること。監視カメラなど機械警備へのニーズが高まる一方で、死角の発生や夜間・雨中での検知能力の低下、さらにはセンサーの誤検知など、検知精度の向上が求められている。ALSOKは従来のセンサーよりも高精度な検知性能を有し、耐環境性能にも優れた3D-LiDARを販売開始する。この製品の特長は以下の通りである。
(1)高精度な検出性能:コニカミノルタ社独自のレーザー投受光技術と走査技術により、検出可能領域は水平画角120°の広画角を実現、垂直方向は24レイヤーの高い分解能を有し、毎秒10フレームでリアルタイムに物体の3D情報を取得。
(2)誤報要因を排除し、人物だけの検出が可能:従来の2Dセンサーでは物体の有無は検知することができたが、対象物の大きさや形を認識することが困難。3D-LiDARは、隙間のないレーザースポット照射と独自の認識アルゴリズムにより、人物に相当する大きさの対象物のみを判別し抽出することが可能。
(3)高い耐環境性能:太陽やヘッドライトなどの外乱光の影響を極力排除しており、屋外警備のシーンにおいても高い品質を達成。
販売ターゲットとしては:
・踏切事故の撲滅に取り組む鉄道事業者
・施設内外に立ち入り禁止エリアを抱える電気事業者、港湾管理者
・従来のセンサーによる監視に比べて高度な安全性を必要とする重要防護施設など
独SICKとのアライアンス契約(2017年3月)
産業用センサーメーカーの独SICK AGは,戦略的アライアンスに関する契約を締結。両社は、急速に成長する自動化市場向け、両社の幅広く補完的な技術ポートフォリオを活かして製品とソリューションの共同開発を行なう。コニカミノルタの3D-LiDARは、24ラインで隙間なく、且つ広角で高精度スキャンを実現している。3Dで動体認識が可能である特長を活かし、ハイセキュリティ分野やデジタルマニュファクチュアリング、デジタルマーケティングなどの状態監視のサービスソリューションへの活用を見据えている。今回のアライアンスの第一歩として、コニカミノルタは,このLiDARのカスタマイズされたバージョンをSICKにOEM供給し、SICKは,このLiDARに、工場や物流の自動化市場向けのインテリジェントセンサーに特化したAppSpaceプラットフォームを実装する。
6. デンソー
デンソーのLiDAR開発
デンソーは、ミリ波レーダーや画像センサーなどの各種センサーを組み合わせることにより、人の視覚能力を超える知覚の実現を目指している。悪環境下での安全な走行エリアの把握はもちろんのこと、死角や見落としの減少、誤認識による不要動作を防ぐなど、あらゆる状況を想定した開発を進めている。LiDARに関しては、1996年に商用車向けに横にビームをスキャンするLiDARを商品化したのを皮切りに、翌年には乗用車向けに縦・横の2次元にビームをスキャンする製品を世界で初めて開発し、商品化した実績がある。(2012年12月に「ダイハツ ムーヴ」の衝突回避支援システム「スマートアシスト」に採用)

図9 (出典:デンソーのHP) デンソーの初期のLiDAR外観 (製品サイズ:幅132 mm×高さ134 mm×奥行き46 mm)
現在、デンソーは自社開発の自動運転向けを目指した新規LiDARの2020年以降の実用化を目指しており、トヨタ自動車へのほか、広く世界の自動車メーカーに供給の可能性もある。
今後のデンソーの方針など
LiDARの今後の市場規模の拡大を見越し、自動車業界では大手部品メーカーに加えてスタートアップ企業も開発レースに参戦。大手自動車メーカーの「標準品」の座を狙った戦いが激化している。2019年1月、米ラスベガスCES 2019の会場でデンソーの加藤専務は「省人化でコスト回収できる分、移動サービス向けの車両は高性能LiDARを多く使っている。移動サービス市場が大きく変わる中、この分野も研究開発を進めている。」と発言。デンソーとしては、ロボタクシーなどの普及期を「22~25年ごろ」と見ており20年以降の実用化を見据える。
アルゴリズムの研究
AIを自動車へ適応させるためには「アルゴリズム」が重要となり、このアルゴリズムをより高性能にして行くには大量のデータが必要になる。データが大量になると学習時間が長くなるので、それを短くできる高性能な「計算機」が必要となる。デンソーとしてはこの分野に関して、車両システムに利用できそうなものがあれば、スピーディに適用させることを考えている。また、アルゴリズム、データ、計算機の3つの技術だけではクルマにAIを適用させるには足りず、他に「半導体」の組み込み技術、AIの品質をどのように保証するかも大事で、総合的にこれらの要素技術に取り組むことが重要になるとしている。
アルゴリズムの研究内容としては、カメラやLiDARから得られた3D情報などを活用した物体の検出、さらにそのデータのトラッキング(移動の軌跡をたどる)による認知がある。フレームごとに切り取っている情報の一部が欠落しても、過去の情報から推測して補完できるとことが特徴である。さらに、未来の軌道の予測も検討しており、歩行者の軌道予測などにも取り組んでいる。
以下、中国メーカ4社の動向を紹介する。
7. Hesai Photonics Technology (禾赛科技)
Hesaiは,2013年にアメリカで設立し,現在は中国・上海を拠点に,LiDAR製品の開発から製造までを一貫して行なっている。現在従業員は600名以上、世界で364件の特許を取得している。Hesaiが独自開発したPandar64、PandarGT(ソリッドステート型LiDAR)とPandora(マルチセンサー融合型)等の製品は、2017年の発売以来、世界18の国・地域の68都市で販売されており、そのうち60%以上の製品がヨーロッパとアメリカ向けに輸出されている。米カリフォルニア州のDMV(車両管理局)が発表した自動運転の公道テストの許可を取得している65社ののうち、50%以上がHesaiの顧客である。
HesaiのLiDAR製品概要
同社のLiDAR製品は,10%の反射率でも対象物を長距離(200 m)で測定でき、またレーザー光の相互干渉を防ぐ干渉防止機能付きである。自動運転分野向けでは世界売上第2位の実績がある。自動運転分野の他、高精度3Dマップ、自律型ロジスティクス等の用途が想定される。
(1)PandarQT メカニカル型LiDAR
64チャネルの近距離用メカニカル型LiDARであり、垂直方向の視野角度は104.2°である。ブラインド箇所への応用に最適な製品である。
図10 (出典:HesaiのHP) Pandar40QTの外観
(2)Pandar40P メカニカル型LiDAR
40チャネルのメカニカル型LiDARで、測定範囲が広く、範囲の精度が高い。垂直解像度は0.33°が得られる。 Pandar40Pのチャンネル配分は、自動運転への応用に最適でである。その他、主な特徴は以下の通りである。
・10%反射率における測定可能範囲:200 m
・40°垂直視野:-25°〜+15°
・最小垂直解像度:0.33°
・他のLiDARからの干渉の影響を受けない
・ノイズ発生源からの干渉を受けない点群の取得

図11 (出典:HesaiのHP) Pandar40Pの外観
(3)Pandra (センサー統合型モジュール)
自動運転車の環境検知のために、Pandoraはカメラ、LiDAR、およびデータ処理機能(Baidu Apollo製)を、高度な同期およびキャリブレーション機能とともに、同じモジュールに統合。LiDARとカメラの機能は以下の通りである。
-LiDAR機能
・200 mの測定距離:対象物の反射が20%であっても200 mまでの検出が可能
・0.33°の最小垂直解像度:最適化されたチャネル分配により、自動運転での車両と歩行者の検出が容易
-カメラ機能
・4 台のモノラルカメラ:広角カメラ4台で車の周囲360度をカバー
・1台のカラーカメラ:1台のカラーカメラで前方向の詳細な情報を取得

図12 (出典:HesaiのHP) Pandraの外観
ベロダイン・ライダーとの特許に関する契約締結
2020年7月20日、ベロダイン・ライダーは、Hesaiと360度サラウンドビューLiDARセンサーの長期グローバルライセンス契約を締結したと発表。本契約の結果、ベロダインとHesaiは、両社が米国、ドイツ、中国で進めている法的手続きを終了することで合意した。サラウンドビューLiDARは自律運転にとって必須のセンサーであり、自律市場を追求している自動車メーカーが世界中で購入している。ベロダイン・ライダーのデビッド・ホールが2005年に発明して以来、この技術はシャトル、産業用ロボット、スマートシティに多く使われている。Hesaiとの関係はベロダインの基礎的LiDAR技術をめぐる大型ライセンス契約として3番目である。
2020年1月の追加資金調達
Hesaiは1月7日、シリーズCで1億7300万ドル(約141億5600万円)の資金調達を完了したと発表した。主要出資者は、独ボッシュグループと光速中国(Lightspeed China Partners)であり、その他、米オン・セミコンダクター、啓明創投(Qiming Venture Partners)、徳同資本(DT Capital Partners)、シンガポールAxiom等が出資。今回、国内LiDAR業界では、1回の資金調達における調達額の最高記録を更新した。
今回の資金調達で、Hesaiは自動車産業におけるパートナーも獲得。ボッシュグループは世界最大の自動車部品サプライヤーであり、自動車用アンチロックブレーキシステム、電子式車体安定システム、エアバッグ制御ユニット等の安全運転システムにおけるトップ企業である。Hesaiは2017年に中国で行われたボッシュの人工知能プロジェクトコンテストに参加し、2019年5月に「オープン・ボッシュ・アワード(Open Bosch Award)」を獲得した。世界で同賞を受賞したスタートアップ企業はわずか2社である。
8. Robosense(速腾聚创)
RoboSenseは2014年に設立され、深センに本社を置き、北京、上海、ドイツ、米国に支社を設立している。R&Dのコアメンバーは、世界のトップの大学やトップの技術系企業出身者である。同社は、チップ、LiDARハードウェア、AIアルゴリズムなどの多くのコア技術分野に取り組み、革新を行っていて、包括的なLiDAR認識ソリューションの提供に取り組んでいる。 RoboSenseは、顧客のニーズを念頭に置いて、オーダーメードのインテリジェント環境認識LiDARシステムを提供している。
現在、RoboSenseには、MEMSソリッドステートLiDARシステムとメカニカルLiDARシステムを含む2つの製品ラインナップがある。顧客には、世界の主要な自動運転技術企業、OEM、Tier 1サプライヤーなどが含まれる。RoboSenseのLiDARは、自動運転物流車両、バス、乗用車などのさまざまなアプリケーションで広く使用されている。Robosenseの現在の主な製品は以下の通りである。
RS-Ruby
RS-Rubyは、レベル4およびレベル5自動運転用の128ビームを備えた最上位のLiDARである。RS-Rubyの垂直解像度は、Robosenseの従来機種のRS-LiDAR-3と比較し垂直解像度の3倍以上を達成し、最小角度分解能は0.1°であり、検出距離は2〜3倍に増加し、高速自動運転の今後の要求を満たすものである。
主要なマルチレーザービームLiDAR製品として、RS-Rubyは前例のない安全性と信頼性を実現。また、-40°Cで動作するという自動車グレードの要件を満たすだけでなく、全天候条件での動作も達成し、複数LiDARとさまざまなタイプの周囲からの光の干渉に耐え、高度な自動運転の検出において、このクラス最高のLiDARである。RS-RubyとRS-Bpearlの組み合わせは、Robo-Taxiに新しい環境認識ソリューションを提供する。

図13 (出典:RobosenseのHP) RS-Rubyの外観
RS-Bperal
RS-Bpearlは、超広角測定視野360°x90°のスキャンが可能で、車両やロボット周辺の死角検知のために開発されたLiDARである。独特のデザインでコンパクトに車体に組み込むことが可能。通常のLiDARでは最短計測距離20~50 cmが多いのに対し、RS-Bpearlは、最短計測距離が5㎝未満となるため、ロボットや車両のごく近傍の障害物を検出することができる。また、最大計測距離は100 mであり、狭い通路や交通量の多い場所で活躍するロボットや車両の周囲計測、障害物検出などに活用できる。
RS-Bpearlは、垂直視野角90°、水平視野角360°と超広角の計測が可能であり、ロボットや車両などの移動体上部に取り付けることで、トンネルや暗渠の天井高や形状把握ができ、自動走行における判断力および安全確保の向上が可能となる。RS-Bpearlのサイズは直径100 mm×高さ111 mm、上部半球の光学部分以外を機体に埋め込むことで、柔軟でコンパクトな設計を可能としている。
図14 (出典:ZMPのHP) RS-Bpearlの外観(スマートフォンの大きさと比較)
RS-LiDAR-M1
RS-LiDAR-M1は、RoboSenseが大量生産の自動運転車用に特別に設計した自動車グレードのソリッドステート型LiDARである。 安全な運転を実現するために、車両に信頼性の高い3D環境認識を提供する。 RoboSenseの革新的な特許取得済みのMEMSテクノロジーに基づいて、RS-LiDAR-Mは構造を大幅に簡素化し、使用コンポーネントへの要求を大幅に抑えている。この新しい革新的なソリッドステート型LiDARシステムは、高信頼性、低コスト、大量生産が容易、車体への統合が容易など、多くの利点を持つ。革新的なMEMS設計に基づいて、RS-LiDAR-M1は、全体的なパフォーマンスの向上がなされている。視野角は120°に増大し、測定範囲、測距精度、1秒あたりの取得点群数などの重要な指標も大幅に改善されている。

図15 (出典:ZMP のHP)MEMS型3D-LiDAR RS-LiDAR-M1の外観 (サイズは120(L) x 110(W) x 50(H)でありコンパクトな設計)
日本市場では、自動運転ベンチャー企業のZMPがRobosenseのLiDARを取り扱っており、2019年12月に3D-LiDARの「RS-LiDAR-M1」を車両関連メーカーと研究機関向けに台数限定で試用販売すると発表している。またZMP社は、近距離広角3D-LiDARの「RS-Bpearl」と超高精細3D-LiDAR「RS-Ruby」の販売も同時に開始するとしている。
9. Livox Technology Company Limited(Livox)/DJI(大疆创新科技有限公司)
Livoxは、DJI(中国のドローンのNo.1企業)のOpen Innovation Programを通じて2016年に設立された独立企業である。 同社は、LiDAR業界における現在の技術的な壁を打ち破り、ユーザ企業がLiDARを自動車等に効率良く組み込む事ができる様な検討を行っている。LiDAR製品は26か国に販売されており、自動運転、ロボット、3Dマッピング、スマートシティ、安全などの産業に広く適用されている。
CEC2020での製品発表
Livoxは、高性能で大量生産可能のLiDARセンサーである「Horizon」と「Tele-15」を発表した。HorizonはCES2020の初日である1月7日から販売開始、Tele-15は2020年4月に販売開始予定である。希望小売価格は、Livox Horizonが99,000円、Tele-15が148,000円。
同製品は従来製品よりもパフォーマンスが向上しており、反射率が10%の対象物は320 mまで検出可能となっている。反射率が50%の対象物は500 mまで検出可能となっている(以前は同じ距離で80%の反射率が必要であった)。さらに、カスタム化されたファームウェアをサポートすることで、検出距離は最大1000 mに拡大できる。また、視野角の99.8%の範囲をわずか100 m秒で走査でき、これは、現在市場で主流となっているリニア走査方式(走査線数128本)のLiDARセンサーよりも優れているとしている。
LivoxのLiDAR技術
Livoxセンサーでスキャンした環境は、積分時間と共に精度が増し、レーザーが視野角内の未検出の空間をより詳細に描き出す。下図で示すように、Livox Mid-40またはMid-100センサーは花の形に似た独自の走査パターンを生成し、周辺環境の3Dイメージを作成。イメージの精度は時間経過と共に急速に向上する。一方、従来のLiDAR センサーは死角を作り出すリスクがある水平リニア走査方式を使用しているため、走査時間に関係なく視野角の対象物の一部が未検知のまま残る可能性があった。LivoxのLiDARセンサーの独自の非反復走査方式により、積分時間が長いほど、視野角のカバー率は100%近くまでカバーされる。
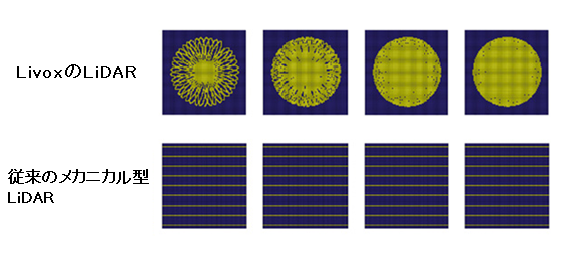
図16 (出典:DroneのHP)Livox独自の非反復走査パターンと従来のメカニカル型リニア走査パターンの差異
LivoxのLiDAR製品
HorizonとTele-15は、L3/L4自動運転に応用できるよう設計された高性能なLiDARである。Horizonは、最大260 mの検知範囲と81.7°の水平方向視野角(HFOV)で、距離10 mの4車線の範囲までカバーでき、積分時間0.1秒での視野角カバー率は、レーザー線数64本のメカニカル型LiDARと同等である。5つのHorizonユニットを使用することで、360度すべての範囲をカバーでき、そのコストはレーザー線数64本のメカニカル型LiDARのわずか5%しかかからない。
高度長距離検知用に設計されたTele-15は、コンパクトかつ高精度で耐久性も備えている。また、リアルタイムでのマッピング範囲も大幅に拡張されており、15°の円形視野角で0.1秒に99.8%の領域をスキャンでき、これは現在市販されているレーザー線数128本のメカニカル型LiDARセンサーの性能よりも優れているとしている。また、最大500 mの検知が可能。Tele-15の性能により、自動運転システムは離れた対象物を事前に検知し、高速の場合でもより多くの反応時間を確保できるとしている。
従来のメカニカル型LiDARは、通常車両の上部に取り付けられるが、風の抵抗や高さのない場所では走行性関連の問題の影響を受ける可能性がある。Livoxはハードウェアと機械設計を最適化し、HorizonとTele-15センサーの本体をコンパクトにしたことで、車両設計段階で、容易にユニットを埋め込むことができる。

図17 (出典:DroneのHP) CES2020におけるLiDAR主力製品の展示
大量生産が可能になったことで、Livoxは集中的な信頼性テストを実施可能となった。2900ユニット以上のLivox LiDARセンサーを、さまざまな環境条件での用途において、個別に、くまなく試験し、各ユニットの誤検出率は100klxの日光下でも1/10000未満だったという。HorizonとTele-15は−40˚C~85˚Cの温度で動作可能で、自動車規格に適合。また、HorizonとTele-15の全体のセンサーは防水・防滴等の規格IP67に適合している。従来のメカニカル型LiDARには、360度の範囲をカバーするために複数の回転式機構が搭載されているが、これは故障率が上がる可能性がある。LivoxのLiDARの独自の製品設計には、回転プリズム以外に可動の電子部品が無く、Livox製品は現在市販されている他社のLiDARと比較して、より高い信頼性とより長い稼働時間を実現したとしている。また、各センサーのレーザー出力は、IEC 60825-1(2014)に準拠した905nmクラス1レーザー製品の要件を満たしており、人間の目にも安全である。
DJIは中国の自動運転スタートアップ企業AutoXにLiDARを供給しており、今回新たに発売されたTele-15もAutoXがFCA(フィアット・クライスラー・オートモービルズ)と共同で開発した自動運転車PacificaXに搭載が予定されている。
10. 光勺科技(AODTBJ)
2020年1月に米国で行われたCES2020において、北京のスタートアップ企業である光勺科技(AODTBJ)がFMCW(Frequency Modulated Continuous Wave;周波数連続変調)を適用したLiDAR製品のデモおよび最新の公道実験動画を展示。現在、LiDARでよく使われているレーザー変調技術は、振幅変調(AM;Amplitude Modulation)と周波数変調(FM;Frequency Modulation)である。AM技術を利用するLiDARは計算量が多い上、他のLiDAR等のレーザーを適用したセンサーに妨害されやすく、エラーが生じやすいという欠点がある。光勺科技のFMCW技術は計算量を低減でき、外部からの妨害にも強い。FM-LiDARを自動運転に利用することにより、自動運転車の安全性の向上と、周辺環境に基づく自律的判断の実現に向けた支援が可能となる。
光勺科技のFMCW技術
従来のLIDARは、レーザーパルスを送信し、光が反射して来るのにかかる時間を測定して、周囲にある対象物がどれだけ離れているかを推定する方法を取っている。一方で、光勺科技のLiDARは、レーザーパルスの代わりに連続ビームを使用している周波数変調連続波(Frequency Modulated Continuous Wdave:FMCW)LiDARとして知られている技術を採用。この技術では、周波数が徐々に変化する連続レーザービームを送信する。光が反射して戻って来ると、LiDARは入射光と放射光の周波数差を測定する。入射ビームと放射ビームの周波数差は、反射して戻って来た入射ビームが移動した距離に正比例する。降雨時にも150 mの距離での対象物の検出が可能である。
また同社のLiDARは、コアとなる特許取得済みのコヒーレント検出技術と疑似ランダム位相符号化技術を使用している。これは、従来のFMCW LiDARとは異なるものであり、レーザー光に対しデジタル位相符号化を実行し、各LiDARが独自のID情報を持ち、自分自身の送信信号の識別が可能とした。これにより、LiDAR相互の干渉を防ぐ事ができる。同時に、疑似ランダム位相符号化技術を使用することで、従来のFMCW技術がレーザー信号変調において非常に高い直線性を必要とする問題を解決でき、温度と環境に対してLiDARが優れた適応性を持つことで、環境の厳しい自動車への応用に最適である。
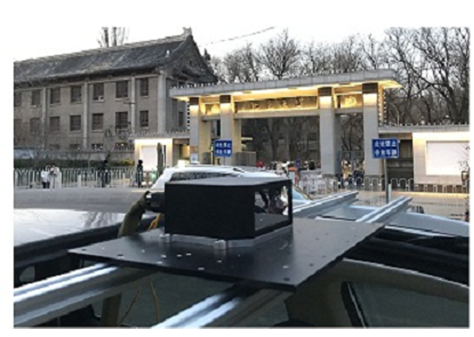
図18 (出典:光勺科技のHP)Lidarの実験の様子
CEC2020において、同社は実際の公道実験の動画を紹介。動画では、自動運転車の走行中、前方150 mの所から逆走して来ている自転車が車の進行方向を確認できる事を示した。また、自動運転車の前でタクシーが視界を遮っている場合でも、自転車を認識する事ができる。従来のレーダーであれば視線がタクシーによって遮られ、自転車の位置が識別できないため、明らかに危険な状況となる(下図参照)。同社のLiDARは障害物を透過して、屋外にある移動する物体のドップラー偏移を鮮明に抽出できるため、自動運転車の安全性向上に大きく役立つという。

図19 (出典:光勺科技のHP)公道実験の紹介の一部(タクシーの後にいる自転車を認識)
以上でLiDARを開発している日本および中国企業の紹介を終わるが、本稿で紹介できなかった日本企業および新興の中国企業も幾つかあることを付け加えておきたい。(後日、紹介する機会を作ることも検討)
―以上―
本稿作成の参考にした記事等は次の通り。
パイオニアHP 3D-LiDAR (http://autonomousdriving.pioneer/ja/3d-lidar/detail/chapter1/)
自動運転LAB 編集部2020年1月10日 業界人必見!CES 2020で発表された自動運転トピックス16選
Response.20th 2020年1月8日 パイオニア、500 mの遠距離計測が可能な3D-LiDARセンサーを開発
Response.20th 2019年12月20日 パイオニア、3D-LiDARセンサー次世代モデルなど展示予定
日経エレクトロニクス 2019.2.14 3大車載センサーの良いとこ取り、三菱が高精度認識技術を開発
三菱電機 HP ニュースリリース 2020年03月12日 「MEMS式車載LiDAR(ライダー)」を開発 先行車両や歩行者などを高精度に検知し、安心・安全な自動運転社会の実現に貢献
MONOist 2020年03月13日 三菱電機がMEMS式LiDARを開発、10 cm角サイズで水平視野角は120°
東芝ニュースリリース 2019年 4月 22日 自動運転システム向けLiDARの測距解像度を改善する計測アルゴリズム技術を開発
東芝HP 2020年07月07日レベル4以上の高度自動運転の実現に貢献するLiDAR向け受光技術を開発
自動運転ラボ編集部 2020年7月10日東芝が開発、ソリッドステート式LiDARで200 mの長距離測定!「自動運転の目」で新技術
日経新聞 2019.8.30 自動運転の要「LiDAR」、京セラが参入 量産化へ
Kyocera Japan HP 独自技術で創出する未来社会 人の眼を超えるセンシング技術でつくる未来とは
コニカミノルタのHP Technologies for the Future 3D LiDAR
OPTRONICS ONLINE 2017年03月30日 コニカミノルタ,独SICKとアライアンス契約
日本経済新聞 2018/6/25 ALSOK、高精度な検知性能を有する「3Dレーザーレーダー」の販売を開始
デンソーHP ニュースリリース 2013年5月10日 デンソー、新型レーザーレーダーを開発~小型化・低コスト化により、軽自動車初の衝突回避・衝撃緩和システム実現に貢献 ~
日経新聞 2019/1/12 デンソー、自動運転の「目」開発へ
自動運転ラボ編集部2018年10月4日 デンソーの自動運転・LiDAR戦略まとめ 開発・提携状況を解説
CarWatch ニュース2020年6月16日 デンソーの技術セミナー「DENSO Tech Links Tokyo」レポート
禾赛科技(Hesai Technology)のHP:https://www.hesaitech.com/en
光響のHP Hesai Technologyについて
36Kr Japan 2020年2月5日 LiDAR技術スタートアップの「HESAI」、記録的に140億円を調達 独ボッシュ出資
Businesswire 2020.7.22 ベロダイン・ライダーがHesai Photonics Technologyとの特許ライセンス契約を発表
RoboSense(速腾聚创)のHP: https://www.robosense.ai/company
ZMPのHP: RoboSense(ロボセンス)社 3D-LiDARシリーズ
日経XTECH 2019/3/20 自動運転センサー「LiDAR」開発過熱 偽物騒動も
自動運転ラボ:国内ニュース 2019年12月2日 自動運転ベンチャーZMP、3D-LiDAR「RS-LiDAR-M1」を限定販売
LivoxのHP:https://www.livoxtech.com/jp/contact
Drone 2020.01.17 DJI、Livoxブランド初出展、高性能・低コストなLiDARセンサー発表 [CES2020]
36Kr Japan 2020.6.26DJI傘下「Livox」、自動運転向け長距離LiDAR「Tele-15」を発売 コスパ最強の10万円台で
光勺科技(AODTBJ)のHP:http://www.laserradar.cn/
36Kr Japan 2020.1.28 中国初、公道実証実験済みのFMCW LiDARメーカー「AODTBJ」
Optinews 2020年1月7日 BEIJING STARTUP CLAIMS NEXT GENERATION OF LIDAR FOR AUTONOMOUS VEHICLES