2020-01-22(令和2年) 豊岡秋久
LiDARは、Light Detection and Ranging (光検出と測距)もしくはLaser Imaging Detection and Ranging (レーザ画像検出と測距)の略で、光を用いたリモートセンシング技術の一つ。パルス状に発光するレーザー照射に対する散乱光を測定し、遠距離の目標までの距離やその性質を分析する装置。近年、LiDARは自動運転に必須の技術として注目されつつある。
(LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remote-sensing technologies applying optics. LiDAR may measure the reflected or scattered light from the objects by emitting pulsed laser light to them so that it detects the distance to the said objects and characteristics. Recently, LiDAR has been drawn attention as one of the indispensable technologies for Automatic Driving Aid System (ADAS).)
LiDARに関しては、米国、ヨーロッパが先行して開発しているが、日本でも自動車会社、部品関連会社などで本腰を入れて進めている。小型化、低コストが今後の普及のキーとなる。
LiDARの基本的な原理、歴史、開発の状況および応用に関して、3回に分けて紹介する。
(1) LiDARの原理、主な応用分野、歴史、市場予測概要
(2) LiDARの宇宙、航空への応用
(3) LiDARの自動車を始めとした移動体応用 (主として自動運転)
今回は第1回 「LiDARの原理、主な応用分野、歴史、市場予測概要」 につき解説する。
- LiDARとは?
「LiDARとは何か」についてNASAの技術解説(LIDAR Tutorial)には次のように書いている。
LiDAR装置から光を対象物に送信する。送信された光は、対象物で反射してLiDAR装置に戻り受信される。光が対象物から反射されてLiDAR装置に戻る時間で目標までの距離を測る。高度な技術を使えば、反射光の性質の変化で対象物の性質を調べることもできる。
LiDARには三つの基本的なタイプがある:
① レンジファインダー(Range Finder)
② DIAL (Differential Absorption LiDAR)
③ ドップラーLiDAR
・ 「レンジファインダーLiDAR」は、最も簡易なLiDARでLiDAR装置から固体目標までの距離を測定する。
・ 「DIAL(吸収差LiDAR)」 は、大気中の化学物質 (例えばオゾン、水蒸気、汚染物質等) の濃度を測定するのに用いられる。DILAでは2つの異なるレーザーの波長を使う。1つは目的の物質で吸収され、他の波長は吸収されない物を選択する。戻って来る2つの波長の信号強度の差によって対象分子の濃度の推定に使うことができる。
・ 「ドップラーLiDAR」は、波のドップラー効果を利用して対象物のLiDAR装置との相対的な移動速度を測定するために用いる。(詳しくは2.4に解説)
- LiDARの原理
2.1 LiDARと似た測距システム
波(音波、電磁波など)の反射で距離を測定する基本は単純で、波を発射し目標から戻るまでの時間で距離を算定する。水中で使うソナーは、音波を適用した距離測定装置(100Hz~100kHzを使用)である。地表や空中で使うレーダーは、電磁波(主にマイクロ波)で距離を測定する装置である。
動物界では、コウモリが短いきしみ音(超音波)を対象物で反射させ、耳に戻ってくる時間差で距離を識別している。コウモリの距離測定は反響定位と呼ばれ、自分が発した音が何かにぶつかって返ってきたもの(反響)を受信し、その方向と遅れによってぶつかってきたものの位置を知る。小型コウモリ類は目がごく小さく、耳は薄くて大きい。多くは、空を飛んでいる昆虫を捕獲し、虫を捕らえる直前には音を発する頻度が高くなることが知られている。
本論から少し逸脱するが、最近の研究に依れば、コウモリは群れで飛ぶ場合、お互い周波数を変えて混信を防いでいる(同志社大学生命医科学部)。
コウモリは超音波を発して周囲の状況を把握するソナーの能力を持つが、集団で飛行するコウモリがお互いの音声の混信をどのように回避しているのかはこれまで判らなかった。最近の研究で、集団飛行するコウモリが発声する超音波の周波数を互いに調節し合うことで混信を回避していることを発見した( 図1参照)。
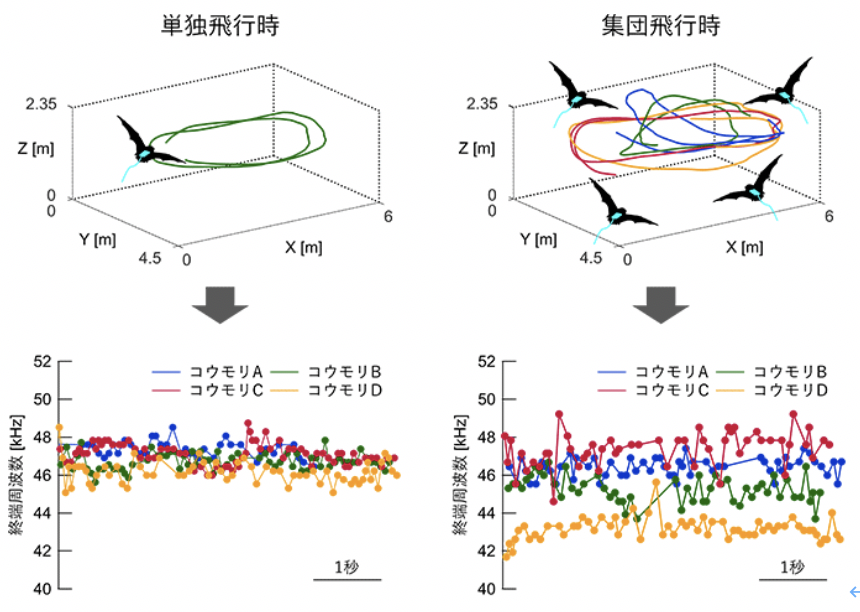
図1: (出典: JST/同志社大学) コウモリの相互の混信防止
集団飛行中のコウモリの飛行軌跡(上図)と放射した超音波の終端周波数*の時間変化(下図)が示されている。
(左)単独飛行時には同じグループの4個体は類似した終端周波数を使用。
(右)4個体を同時に飛行させると、お互い終端周波数が重ならないように調整する。
*終端周波数: コウモリが放射する周波数降下音の最後の周波数。
2.2 LiDARの基本的な測距方法
最も多く使用されているレンジファインダー型LiDARの基本的な測距方法は次の通り。
① LiDAR装置のレーザーから光パルスを発射。
② 対象物から反射したレーザー光をLiDAR装置のセンサーで受信。
③ 反射光がLiDAR装置から発射されてから到達するまでの時間の測定。
④ 距離は次の式で求められる:
距離 = (光の速度) x (到達までの時間)/2
図2に測定方法を示す。例として1秒間に100万回測定する事を想定したケースを考えている。送信光パルス幅は、現在入手可能なパルス型レーザーの最短幅である数ナノ秒 (10-9秒)を考える。送信光パルスおよび受光素子の受信パルスの裾広がりに対するガードタイム (送受信の干渉を防ぐための時間) を考慮に入れると測定可能距離は、約5 m~145 mとなる。
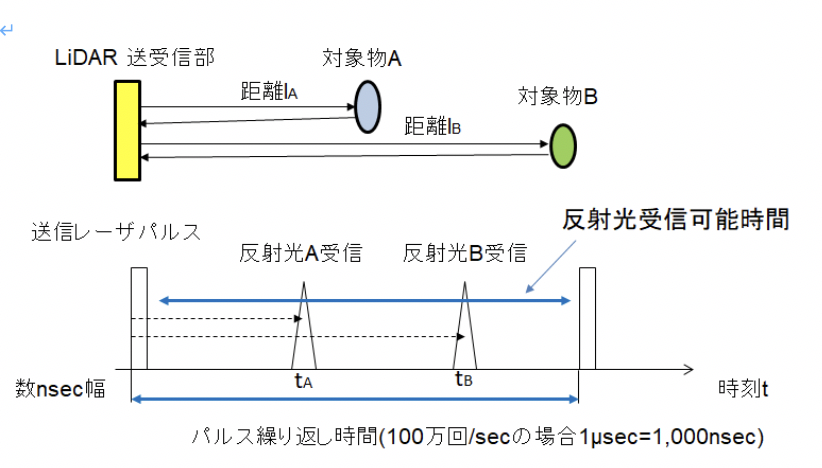
図2 :(筆者作成) LiDARの距離測定の原理
2.3 飛行機・ドローンによる上空からの測定の例
「地理情報システム (GIS)」 は LiDARの応用の一例である、3Dマッピングモデルのデジタル標高モデル (DEM) 、またはデジタル・テレイン・モデル (DTM**) の作成に使われる。(図3参照)
[DEM](「数値標高モデル」)は、計測したデータから建物などの高さを取り除き、地表面の標高を出したもの。
[DTM](「数値地形モデル」)は、DEMと同じ意味で使われることもあるが、傾斜や斜面方位、峰線、谷線、地質、植生などのデジタルデータを含む。
LiDARを上空からの観測、測定に応用した場合、以下の様な条件、仕様での利用が期待される:
比較的狭い飛行区域(10 km2または直線で100 km)
植物が生育している場所の地図作成
地表からはアクセスが難しい地域への適用
リアルタイムに近いデータの取得、繰り返しデータの取得
2.5~10cmの精度要求
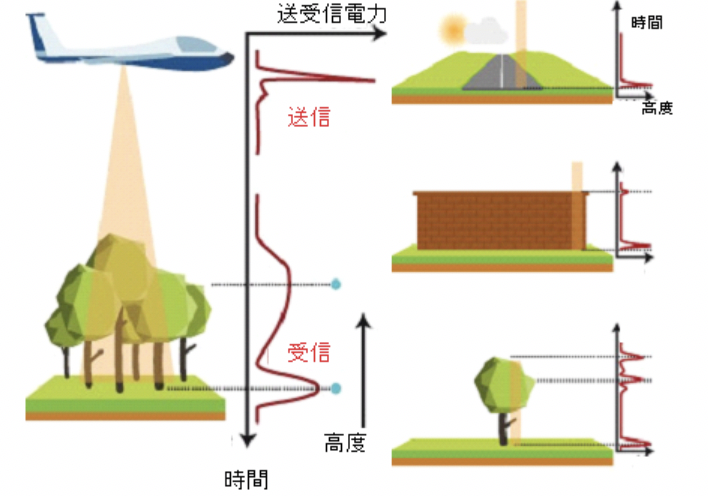
図3: (出典: Yellow ScanのHP) LiDAR搭載の飛行機等による地表の観測
2.4 高度なLiDAR技術
(本項はやや詳しいので、読み飛ばして頂いても良い。この内容はNASAのLIDAR Tutorialをベースにしている。)
ドップラーLiDARは、目標物の速度の測定に用いられる。LiDARからの送信された光が、LiDARに近づいて来る目標と遠ざかって行く目標に当たった場合、反射光/散乱光の波長が僅かに変化する。この現象はドップラーシフトと云う。LiDARから遠ざかって行く目標の場合は、戻って来る光の波長は長くなり(red shift)、LiDARに近づいて来る目標の場合は波長が短くなる(blue shift)。大気は、多くの微小な塵とエアロゾル物質を含みほぼ風速と同じ速度で移動するため、LiDARを使いこれらの物質の移動速度を測れば、風速が得られる。
目標物で散乱した放射光は、集光した後で処理され、目標物の情報、目標物までの経路の情報を得ることができる。従来型のLiDARは収集した光の強度と送信から受信までの時間遅延しか観測できなかったが、最新のcoherent laser radar (CLR) と呼ばれる装置は、光の強度と遅延時間の他に局所的な散乱光の位相情報も記録することができる。これによって目標物のより詳細なデータを得ることができる。
2.5 LiDARに使われる主な素子
(1) レーザー: 科学研究以外の分野では波長 600-800 nm のレーザーが最も一般に用いられる。安価で大出力のものが得られるが、「目に優しく」はない(失明の可能性がある)。「目に優しい」ことは軍事利用ではしばしば必要となる。波長1550 nm のレーザーは「目に優しい」が、十分な出力の物を得るのが難しく、一般的ではない。航空機搭載型では一般に波長 1064 nm を使う。海底探査システムでは水中透過性の高い 波長532 nm を使うことがある。レーザーでは、「波長」だけでなく「発光間隔」と「発光時間」を適切に選ぶ必要がある。
(2) スキャナと光学系: データ収集速度は、システムのデータ走査速度にも影響される。スキャナは二次元的に行われるが、その方法は様々である。物理的にスキャンする方法としては、二枚の平面鏡を振動させるもの、多角形の鏡を用いるもの、スキャナが二軸をもつものなどがある。最近は、耐久性の観点から光学的にビームを振らせる方法、例えばフェーズドアレイ方式なども採用されつつある。光学系の性能は、角度方向の分解と、検出できる距離の限界に影響する。反射光の分離には、穴の開いた鏡を用いる方法とビームスプリッターを用いる方法がある。(2.6に詳しい説明)
(3) 受光器と電子機器: 受光器にはさまざまな物質が用いられる。ケイ素とインジウム・ガリウム・砒素を用いたピンフォトダイオードやアバランシェフォトダイオードが一般的だが、波長によっては光電子増幅管も使われる。受光器の感度は、LiDARの他の部分の設計とうまくバランスを取らなければいけない。
(4) ポジショニングとナビゲーション: ライダーを可動型のプラットフォーム(航空機や人工衛星)に搭載する場合は、センサーの絶対的な位置と方向を決定する装置が必要である。GPSと慣性誘導装置(ジャイロ等)で相対的な位置を把握する。
2.6 LiDARのスキャン方式について
自動運転用の車載LiDARは、対象物の形状や位置などを知る必要があるので3次元データを取得できる3D LiDARとなる。
これまでの3D LiDARは、360°全方位を探知する機械的回転方式が主流であった。そのため駆動部にモーターが必要で、小型化・軽量化が難しく、耐久性に問題があり、コストも高くなる等、デメリットが多かった。このため、半導体技術や光学技術で小型にする「ソリッドステート(Solid State)」化が進んでいる。回転機構ないのでレーザー照射角は限定されるが、小型なため設置場所が自由になり、複数のセンサーで360°をカバーでき、車載用として主流になりつつある。
ソリッドステート式の一つに「MEMS方式」(Micro Electro Mechanical Systems)がある。MEMS方式のLiDARは、一般的に電磁式のMEMSミラーを用いてレーザー光を走査する。この方式の利点は、モーターを使用せずに広範囲をスキャンできる点。
その他、光学的に光の方向を変化させるフェーズドアレイ方式、ある範囲を一度にスキャンするフラッシュLiDARなどの方式の開発が進められている。
表1にスキャン方式を採用している主な企業を示した。
| 類別 | スキャン方式 | 代表的な参入企業 |
| 走査型 LiDAR | 機械的回転 | Velodyne, ibeo, Hokuyo, Konica Minolta, Lightwave Optronics |
| 走査型 LiDAR | MEMS | Bosch, Innoluce(Infineon), Pioneer |
| 走査型 LiDAR | フェーズドアレイ | Quanergy |
| フラッシュ LiDAR | スキャンレス | ASC(Continental), LeddarTech |
表1: (出典:センサイト) 主なスキャン方式と採用メーカ一覧
2.7 LiDAR用の超小型素子の開発
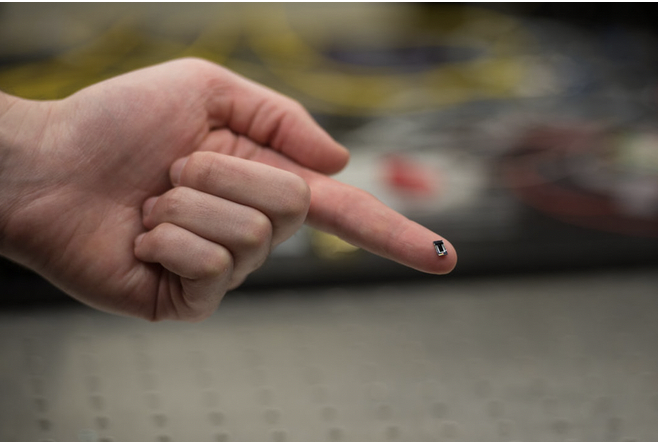
図4 : (出典:Voyant Photonics) LiDAR用超小型素子
LiDARは、ロボットや自律運転車が周囲を認識するのに必要な装置だが、従来のレーザーやセンサーは握りこぶしほどの大きさになる。しかし、Voyant Photonicsが開発した新しいLiDARシステムは超小型で指先にのるほどの大きさである。
LiDARは、車が中距離の物体を検知する方法として使われる。長距離になるとミリ波などによるレーダーが、至近距離になれば超音波センサーがより有利であるが、1メートルから数十メートルの範囲ではLiDARが有利になる。
Voyantが開発した超小型のLiDARユニットが実用になれば、これを車の四隅などに配すれば内外の詳しい位置データが分かるし、消費電力もわずかで、車のデザインを損なうこともない。
従来のチップベースのフォトニクスで、光素子の表面からレーザーのようなビームを照射しようとすると、混み入った場所で光が自分自身と干渉してしまい、照射角度もパワーも小さくなると云う問題があった。Voyantの「光学フェーズドアレイ」では、チップ内を通過する光の位相を調整することで問題を回避している。その結果、可動部品を使わず、周囲に強力な可視光外の波長の光線を広い角度で高速に照射できるようになった。しかもその光線は、指の先に載るほどの小さなチップから送信される。
(以上、GIZMODOの記事をベースに作成)
- LiDARの主な用途
(1) 森林の管理と計画: 林冠の高度と地表面の高度データから垂直方向の分布を割り出し、森林の容量密度などを計算。
(2) 洪水のモデル化: 洪水に関して必要とする地形、市街地の建築物などの詳細データをLiDARで取得し、正確な洪水モデルに関しての詳細を提供する。
(3) 汚染のモデル化: DIALの手法で空中の汚染物質の微粒子を検知することにより、汚染状況の調査を行うことが可能。これにより汚染対策が可能。
(4) 地図作成: LiDARの高精細の測定により、高精度地図の作成が可能。
(5) 市街地計画: デジタル地表モデルを作成することにより、市街地の再開発計画を作成。
(6) 海岸線管理: 緊急時対策のための海岸侵食の調査。
(7) 石油、天然ガス探査: 油田、ガス田の上部の大気をLiDAR(DIAL)で調査することで探査が可能。
(8) 考古学: 発掘のスピードアップのために、森林の林冠を透過した地図を作成。
(9) 建築物の修復: LiDARを使って建築物の詳細デジタル画像を記録し、建築物の修復時に先ずこのデータを参考にする。
(10)自動運転のためのナビゲーション(第3回で記述): 多くの自動車関連企業が試験中。
(11)気象学: 大気の成分、構造、雲、エアロゾルの研究にLiDARを使用。(DIALの応用)
(12)地質学: 航空機搭載のLiDARとGPSにより断層の検出や隆起の測定が可能。NASAの[ ICESat ]は、この目的のLiDARを搭載する観測衛星。図5はセントヘレナ山の観測例。

図5 :(NASA) セントヘレナ山の噴火(2004年)の例。セントヘレナ山(Mount Sent Helens)は米国ワシントン州、シアトルの南約150kmにある大型の活火山、1980年5月に大噴火を起こした。
(13)物理学・天文学: 月に設置された反射鏡を使用して地球と月の距離の観測を行っている。また1996年11月に打ち上げたNASAの火星周回衛星[ MOLA =Mars Orbiter Laser Altimeter]には火星地図作成のためLiDARが搭載されている。地表高度を含む地図作成は4年半かけて終了した。また、2008年にNASAはLiDARを搭載した[ Phoenix Lander ]で火星で雪を観測している。(第2回で記述)
(14)警察: スピード違反の検出には、無線のドップラー効果を使ったレーダー装置が使われているが、LiDARを適用した方が、はるかに小型化が可能である。(図6参照)

図6 : (Lidar UK.com) レーザー型スピード検知機
- LiDARの歴史
LiDARの開発に関する主なイベントは以下の通りである。
1961年にHughes Aircraft社は、レーザーの発明の直ぐ後に類似のシステムを開発した。このシステムは衛星を追跡するため、レーザーによる画像データの収集と光の反射波が戻って来る時間の測定を組合せたもので、当初は[Colidar] (Coherent Light Detecting and Ranging)と呼ばれた。その後出現したレーザーによる測距装置、高度計、LiARは、全て[Colidar] の応用である。
地図作成用のレーザー測距装置も1960年代に開発が始まっている。国土地理院によると、1980年代までは、衛星による位置測位(GPSなど) や飛行機など移動体が使う慣性航法装置(INS=Inertial Navigation SystemもしくはIMU=Inertial Measurement Unit) は精度、信頼度が不足していたため、上空からの精度の高い測位の要求が多くなった。
1970年代になるとNASAが地球環境の変化を知るためにLiDAR搭載の衛星を使い始めた。これで広範囲にわたる植物の生育状況、天候変化、大気の組成の移り変わり、などを長期間にわたり繰り返し調べることができるようになった。
・ アポロ11号で、LIDARで地球と月の距離の測定が行われた。地球上のレーザーで、アポロ11号により月面に設置された再帰反射器(コーナーキューブ)を狙い、反射した光が戻ってくるまでの時間を測り、正確な地球/月の距離を得た。
・ 2009年7月末にはアポロ15号が、有人着陸船(LM=Lunar Module)を月面に降ろし探査をし、司令船(CSM=Command & Service Module)が月を50周回したところで回収した。 [CMS] は、74周回目に[ PF ](Particles and Fields) と呼ぶ小型衛星を月周回軌道に投入した。[ PF ]には、月の質量、重力の変化、近くを浮遊するチリの組成、月と地球の磁界の相互作用、などを測定するための機器が搭載されている。[ CSM ]は周回中、[ LM ]で運ぶには重すぎる機器を自分の科学機器搭載室(SIM = science instrument module)に搭載し、カメラ、ガンマ線分光計、レーザー高度計、質量分析計、などで月面の探査を行った。
1990年代になって、レーザスキャナの製造会社が2000~25,000パルス/秒を出すLiDARセンサーの供給を開始。現在の仕様と比べると未熟ではあったが、LiDARが将来性のある技術ということを証明した。地理空間のユーザは、上空からLiDARで取得したデータを地表面のマップ作成および特徴抽出に適用することに興味を持った。
LiDARの技術が自動車の世界に初めて導入されたのは2005年。きっかけは、スピーカーメーカー「Velodyne」のCEOでエンジニアでもあったDavid Hall氏が、ロボットカーレース「DARPAグランド・チャレンジ」に参加する際、周辺環境をもっとよく把握するため、北米トヨタのピックアップトラック「タンドラ」を改良しようと考えたことから始まった。彼は押しつぶしたミラーボールのような容器にレーザー送受信センサーを64個搭載し、ルーフパネルに取り付けた。初歩的なレーザースキャナーを使っていた他のチームは、この技術を知って騒ぎ立てた。「Velodyne」社はハイエンドスピーカーの生産をやめ、LiDARの生産を開始。再びレースが開催された2007年の出場者は大多数がVelodyneのLiDARをルーフパネルにつけるようになった。
(以上、BCC Researchの”Brief History of LiDAR, Its Evolution and Market Definition”に基づいた内容)
[参考] 初期段階での地図作成へのレーザーの測距応用
国土地理院によれば、1960-1980年代に、地図作成用途としてレーザーが使われた装置の例は次の通りである。
スウェーデンAGA社: ジオジメーター6BL型 (He-Neレーザー): 1960年代から製造されていた。

図7 :(国土地理院のHP) ジオジメーター6BL型
・米国 Hewlett Packard社:
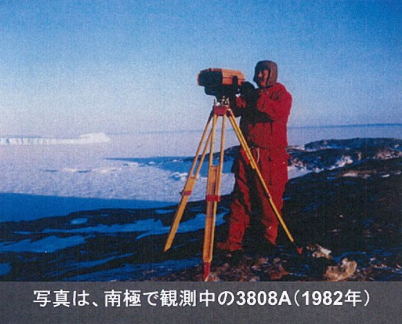
図8 : (Hewlett Packard) HP3800B、HP3808A 、GaAS レーザを使っている。
- LiDAR関連市場概要
矢野経済研究所の調査によると、自動運転用センサーの市場は伸び続け、LiDARやレーザーの市場規模は2017年の約25億円から約4959億円まで約200倍に急拡大するという(図10参照)。 LiDARでは、ここ数年は自動車向けがほぼ100%に近いシェアを持つ。
LiDARの市場規模は2025年には約3,300億円、2030年には約5,000億円に成長する見通し。
LiDAR、カメラ、ミリ波レーダーなど、それぞれ特徴があり、組み合わせて搭載するというのが現在主流の考え方だが、第4のセンサー登場の可能性も否定できない。
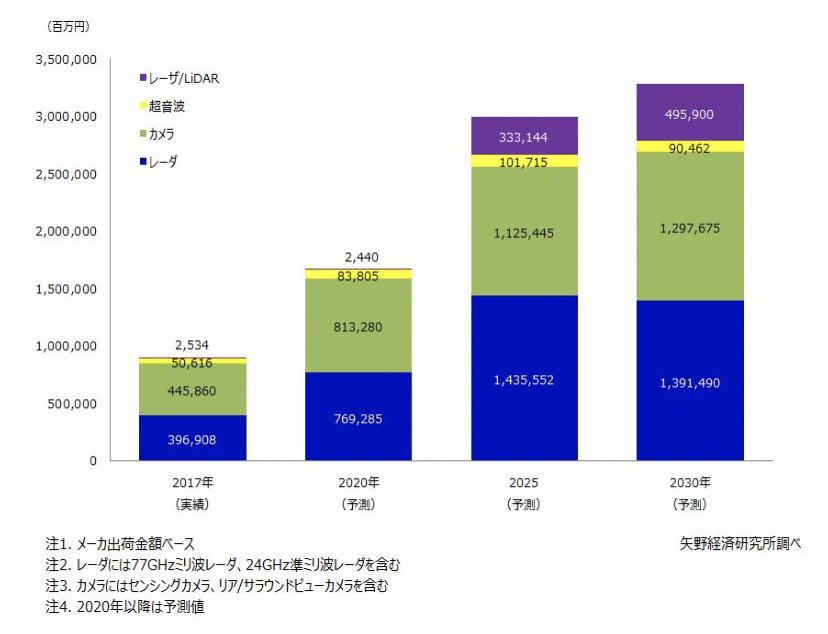
図9 : (出典:矢野経済研究所) ADAS/自動運転用センサーの世界市場規模予測
―以上―
本稿作成の参考にした記事は次の通り。
Wikipedia:Lidar
NASA: LIDAR Tutorial
JST: コウモリが互いの超音波の周波数を変えて混信を回避することを発見(同志社大学、科学技術振興機構(JST))2018.5.3
YellowScan: How LiDAR works?
Wikipedia: アバランシェフォトダイオード
KEYENCE: くるまづくりコラム
センサイト: 車載LiDARの最新の動向
GIZMODO: 超小型チップにLiDAR機能を搭載
Lidar-uk.com: Usage of lidar
BCC Research: ”Brief History of LiDAR, Its Evolution and Market Definition”
国土地理院資料: 三角測量から三辺測量へ
自動運転ラボ編集部: 急拡大!2030年のLiDAR市場、現在の200倍に 5000億円規模、自動運転車普及で(2018.7.3)
矢野経済研究所: プレスリリース 2018/06/29