2020-04-11(令和2年) 豊岡秋久
(As explained in the first report dated January 22, LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remote-sensing technologies applying optics. In this report, the applications to space are introduced. There is a long history of 50 years for LiDAR in the space arena. Regarding the applications to aviation are reported in the next report.)
- NASAの取り組み
1.1 月との距離測定(月レーザー測距実験)
1962年、マサチューセッツ工科大学のチームが初めて反射レーザーのミリ秒パルスを観測することに成功したことを受けて、1969年にアポロ11号により運ばれた反射器を月面に設置し、月までの距離を測定する実験が開始された。LiDARを用いた地球と月の距離の測定である。地球上のレーザーで、月面に設置された再帰反射器(コーナーキューブ)を狙い、反射した光が戻ってくるまでの時間を測定する。
往復で約2.5秒の時間を要するが、地球と月の相対運動、地球の自転、月の秤動、気象、極運動、地球の大気による伝播遅延、地殻運動や潮汐作用による観測局の運動、大気中の経路による光速の差、相対性理論による効果等の影響を受ける。この様な影響により、観測ごとに距離は異なるが、平均値は約38万4,467kmであった。
月の表面では、ビームはわずか約6.5 kmの幅であり、これは3 km離れたところから動く10セント硬貨をライフル銃で撃つようなものだと喩えられる。数秒毎に反射器に向けて発射される1017個の光子のうち地球に戻ってくるのは、良い条件の時でわずか1個である。
月面に反射器を設置する同様のミッションは、アポロ15号、当時のソビエト連邦のルノホート1号とルノホート2号でも行われた。
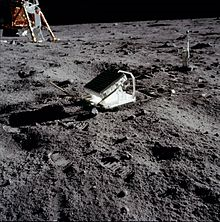
図1 (Wikipedia) アポロ11号のミッションでの月レーザー測距実験
1.2 LITE
The Lidar In-space Technology Experiment (LITE)は、Langleyにおいて開発され、スペースシャトルDiscoveryにSTS-64のミッションの一つとして搭載された(1994年9月9日打上げ)。 LITEは、光検出と測距のための装置で、地球大気の研究のためにレーザー・パルスを利用した光学レーダーで、NASAの最初の本格的なLiDARによる宇宙からの観測のスタートであった。
1994年9月9日から20日の間、53時間に渡って40 G byte以上のデータを収集した。これで雲や嵐の構造、粉塵雲、汚染物質、森林火災、表面反射など、これまでに前例の無かった映像データが得られた。北欧、インドネシア、南太平洋、ロシア、アフリカなどの上空で研究が行われ、20カ国65グループが地上および航空機の装置を使って、LITEのデータの検証測定を行った。
LITEは、地球の大気を宇宙から観測するという新しい手法を提供し、これ以降のLiDARのミッションの先駆けとなり、後継のミッションであるCALIPSO、ICESat、ICESat-2、GEDI、CATSの基盤となった。各ミッションに関しては以下に述べる。

図2 (出典:NASA) DiscoveryのSTS-64ミッションとして搭載されたLITE
1.3 ICESat/ICESat-2
ICESat (Ice, Cloud, and Land Elevation Satellite) はNASAによって打ち上げられた地球観測衛星。レーザー高度計(LiDAR)を搭載して極地における氷床と海氷の厚さを計測し、地球温暖化の影響を見積もる基礎データを収集。またレーザー高度計の観測により、雲とエアロゾルの鉛直方向の構造、海面の水準変動、土地の標高および植生に関する情報も取得した。
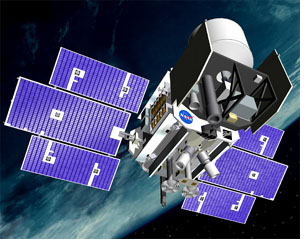
図3 (出典:NASA) ICESat 衛星全容
ICESatはLiDARを地球科学に応用した最初の人工衛星であり、2003年1月13日にVandenberg空軍基地よりデルタ IIロケットによって打ち上げられ、高度590 km、軌道傾斜角94度の近極軌道へ投入された。
1基目のレーザーが最初の観測周期で故障したため、残り2基のレーザーを使用し、33日間の観測を年に2~3回のペースで行うスケジュールに変更された。2003年2月から2009年10月まで7年以上にわたり、南北両極とグリーンランドに存在する氷の経年変化データを主に収集した。2010年2月には寿命でレーザーが出力が低下し運用を中止した。
ICESatがもたらした観測データは米国氷雪データセンター(NSIDC)を通じて公開され、世界各国の研究者が利用可能となっている。その分析から得られた知見は極圏における氷床と海氷の急速な減少を定量的に裏付けることとなった。2008年11月、南極バード氷河において、2005年から2007年にかけて氷下湖で融けた氷が洪水を起こして氷河の流失が10パーセント加速しているというメイン大学研究チームの調査結果が報じられた。 2009年7月にはJPLによって冬季における北極の海氷が2004年から2008年にかけて68 cm薄くなり、多年氷の面積が154万平方km縮小しているという研究結果が発表されている。
2012年4月25日付のネイチャー誌に発表されたイギリス南極調査研究所(British Antarctic Survey)の分析では、ICESatによる450万回の計測データを時系列に沿って解析した結果として、南極の棚氷54箇所のうち20箇所で、海流温度の上昇によって棚氷の下面からの溶融が加速されている、と報じている。また、ICESatによって得られた植生データからは、地球全球をカバーする森林地図が作成され2010年7月に発表された。この成果は他の衛星2基(Terra、Aqua)とのデータを総合したものである。
ICESat-2は、ICESatの後継機として、2018年9月15日に打ち上げられた。ICESat-2の目的は気候変動の研究上重要なデータを残したICESatのミッションを引き継ぐことであり、極圏の氷の変化を継続的に観測し、その質量収支(Mass Balance)を明らかにするとともに、海面レベルの上昇に対する関連性を見積もる。さらに地球全球における植生の樹高データを収集してバイオマスの総量を把握することにより、気候変動による植物の炭素循環の研究にも役立っている。この衛星により3ヵ月ごとに地球全球の標高データを更新することができる。 ICESat-2はシングルビームのライダーを搭載したICESatの設計を全面的に改め、観測機器としてマルチビーム・ライダーのATLASを搭載している。
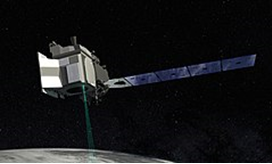
図4 (出典:Wikipedia)軌道上のICESat-2(イラスト)
1.4 Clementine/クレメンタイン
Clementineは、NASAと国防総省弾道ミサイル防衛局[MDA]の共同プロジェクトで、1994年1月25日にVandenberg空軍基地より打上げられた。このミッションの目的は、各種センサおよび宇宙船用の部品を宇宙環境に長期間曝すテストを行うことと、観測・測定としては、紫外線、赤外線を含む色々な波長で画像を撮影すること、およびレーザー高度計による測距、荷電粒子の測定などであった。また具体的目的としては、月および小惑星の地表面の鉱物資源の評価および、月の緯度60Nから60Sまでの高度想定および小惑星Geographosのサイズ、形状、回転特性、表面特性、クレータの統計を得ることであった。
月の極周回軌道に投入された「クレメンタイン」から71日間にわたり観測が行われ、4台のカメラによる計200万枚以上の画像と、レーザー距離計(LiDAR)による月全体のデジタル地形データが得られた。月南極のクレータの内側に全く日光が当たらない領域(永久影)があることが判り、その場所に浅い角度でレーダー波を当て地球のアンテナで受信した結果、水の存在を示唆する観測結果が得られた。ただしこの観測結果の解釈は確定的ではないため、実際に月に水が存在するかはその後の探査計画の課題となっている。
当初は月探査の終了後に月周回軌道を離脱し、地球と月でスイングバイを行ったあと小惑星に接近してその探査を行う計画であったが、故障により推進剤が失われたため、小惑星の探査は中止となった。

図5 (出典 Wikipedia) Clementine衛星本体
その後、Clementineの観測によって得られた月の全球をカバーするマルチ・スペクトルの画像データは一般に公開され、月面の鉱物分布を調べる分光地質学の基礎資料となるなど、各国の研究者に利用されている。 第6図はその一例である。
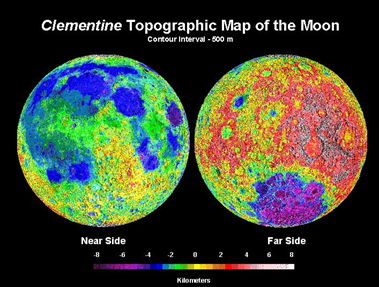
図6 (出典:USRA*) Clementineによる月の高度測定結果。低い場所は青から紫,高い場所は赤になるように順に色づけ。これから判ることは、海と呼ばれた領域が確かに高地より低いこと、および月の裏側に直径2,500 kmにもなるサウスポール・エイトケン・べースンが存在することである。
*USRA: Universities Space Research Association
1.5 CALIPSO/カリプソ
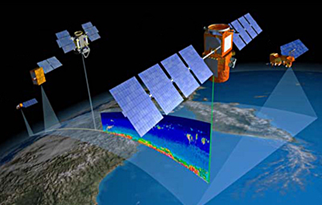
2006年にCALIPSO・カリプソ (Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations)は、NASAとCentre National d’Etudes Spatiales/CNES(フランス国立宇宙研究センター)が共同で、”A-train”と呼ばれる地球観測衛星群の一つとして地球を周回する軌道に、2006年4月28日にCloudSatと共に打上げられた。15秒間隔で同地点の上空を通過するCloudSatのレーダーと連携観測が行われている。 CALIPSO は、雲やエアロゾルの先進的研究を含む次世代気候観測を行い、気候変動の予測および大気の研究に貢献している。
図7 (出典:NASA) 2006年に打上げられたCALIPSO(最も手前)は一連の地球観測衛星群のひとつとしてICESat等と共同して雲やエアロゾルのデータを観測し、気象予測や大気汚染の研究に資する。
エアロゾルは、大気中に浮遊する小さい粒子であり、砂漠由来の砂埃、海の塩、火山の噴火物、森林火災の煙などの天然物、石炭、石油などの化石燃料の燃焼、化学製品の製造、自動車走行による排出物により構成される。
エアロゾルの濃度が上がると健康上の問題を引き起こすことがあり、特に喘息や呼吸系の病気を持つ人には影響が大きい。また、気候にも大きな影響を及ぼす。エアロゾルの形状と成分により、太陽光を反射する場合と太陽光を吸収して大気を温める場合がある。また、雲の存続時間を変化させ、降雨量にも影響する。さらには、化学反応を起こして、大気の成分を変えることもある。
搭載機器の一つがCloud-Aerosol Lidar with Orthogonal Polarization (CALIOP)と呼ぶLiDARであり、Nd:YAG Laser (ネオジム・ヤグレーザー)で発振した1064 nmと532 nm(逓倍器により周波数を倍にした波長)の2波長で観測を行い、雲とエアロゾルの高分解能鉛直方向分布を得ている。また、CloudSatとは補完的関係にあり、これまでに無かった3-D的な視点により、雲とエアロゾルがどのように形成され、変化し、天候や気候に影響するかを捕捉している。
1.6 CATS
NASAのCATS(Cloud-Aerosol Transport System)は、LiDAR技術を適用したリモートセンシング装置、ISS(国際宇宙ステーション)から大気中のエアロゾルと雲を観測する。CATSは、エアロゾルと雲の特性と相互の関係の解明を進めるための装置で、それまでの宇宙LiDARと比べ、超高速周期で光粒子のカウントができるLiDARである。一般にISS搭載の科学実験装置の開発には多額の費用を要するが、CATSは、低価格で合理的な手法を示した良い例であった。(因みにこのLiDARはISSでは日本の実験棟(JEM-EF)に設置された)
CATSは、2015年1月に打上げられ、ISSに搭載され、運用は2017年10月30日に終了した。このミッションの期間、CATSのLiDARは雲とエアロゾルの垂直方向の構造の測定が行われた。対象としては、火山の噴火、中国およびインドにおける人工的な汚染、北米の山火事の煙、中東の砂嵐などである。
CATSで得られたデータは、科学関連者が自由に利用でき、多くの研究、国内、国際科学会議で引用されている。

図8 (出典:NASA) ISSに搭載されたCATS。この写真は、アフリカの西海岸の上空を通過するISSから撮影したものだが、写真右側にCATSが見える。また、ダストによる雲が大西洋に広がっているのが目視でも判る。CATSは、雲 (ダストと凝縮された水蒸気)の詳細データを取得し、科学者が、地球の気候システムに関するモデルの改良すること、および正確な気候変動の予測をすることを支援している。
CATSは、ISSが同じ場所を一日の異なる時間において観測できるため、昼と夜での雲とエアロゾルの変化を知ることができる。また、データを6時間以内で得ることができ、砂嵐、山火事、火山噴火の正確な予測が可能である。
1.7 GEDI
GEDI(Global Ecosystem Dynamics Investigation)は、国際宇宙ステーション(ISS)に搭載するため2018年12月に打上げられた。GEDIのLiDARの役割は、気候と土地利用の変化が生態系の構造とダイナミクス(動作、平衡状態に影響を与える力)に及ぼす影響を調べることにあり、これで地球のカーボン・サイクルと生物多様性の定量化と解明に大きく役立っている。ISSからLiDARを使って熱帯林と温帯林を含む世界的な森林の垂直構造の高解像度な観測を初めて行った。GDEIは次の三つの科学的な問題に取り組んでいる。
① 地表面における炭素収支は?
② 今後数十年において、大気中の二酸化炭素を軽減する上で地表面の役割は?
③ 生態系の構造は、生息環境特性および生物多様性にどの様に影響するか?
DELIのミッションの概要を以下の表に示す。またLiDARの構成を図9に示す。
表1 DELI のLIDAR (EVI-2)の主要な内容
| 打上げロケット | Falcon 9 |
| 高度 | 400km |
| 軌道傾斜角 | 51.6° |
| ミッションの主体 | NASA |
| 装置 | LIDAR |
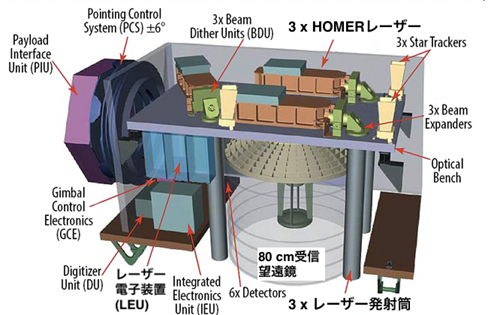
図9(出典:University of Maryland)レーザー高度計・ GEDIのLiDAR構成図。3組のレーザー発射装置があり、それぞれは「レーザー電子装置(LEU)、ビーム発信装置(BDU=beam dither unit)、HOMERレーザー、それにレーザー発射筒からなっている。反射レーザーを受信するのは、中央部の口径80 cm受信望遠鏡。
GEDIのLiDARは、測量に必要な精度を持つシステムで、3本のレーザー光発射装置を使い並行する600 m間隔に設けられた8本の観測線に沿ってレーザーを当て続ける。各レーザーは、毎秒242回発光し、地表の25 m幅の領域を照射して、地表樹木等の高さを観測する。
24か月のミッション期間で約100憶回の雲の無い観測を行うこととなる。
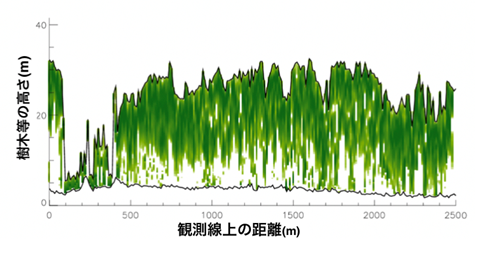
図10 (出典:University of Maryland) LiDARで得られた観測線に沿った植物の垂直分布。横軸は観測線上の距離、0 – 2500 mを示し、縦軸は樹木の高さ0 – 40 mを表している。これによると多くの樹木は高さ30 m位で、200 – 400 m区間をを除き密生していることが判る。
- JAXAの取組み
2.1 はやぶさ初号機
はやぶさ初号機では、レーザーを使用した測距装置は3台搭載された。
レーザー高度計 (LIDAR)
レーザー測距機とも呼ばれるレーザー高度計 (LIght Detection And Ranging; LIDAR) は、YAGレーザー光を用いた測距装置である。地表の反射率を測定する科学機器としての運用も想定されていたため、計測距離は50m – 50kmと広範囲。また、着陸降下時の距離測定値を利用しイトカワの重量と密度の推定が行われた。
レーザー・レンジファインダー (LRF)
レーザー・レンジファインダー (Laser Range Finder) は、レーザー光を用いた測距装置で、LRF-S1とLRF-S2の2台がある。
LIDARが比較的長距離用なのに対してLRF-S1は近距離を担当し、30度ほどの角度を持たせた4本のレーザー光を用いて対象面の傾きを測定する。70メートル以下でLIDARと併用し、互いの誤差を確認しながらLRF-S1の測定へ切り替える。LIDARがレーザー単パルス波を用いて反射されて来るまでの時間を計測するのに対して、LRFではFM変調した連続レーザー波を送信して反射波との位相差を計測する。
LRF-S2は、サンプラー・ホーンの長さを測る。着地時などにホーンが押されて縮むが、機体側からホーン先端部との距離を計測することで小惑星との接触を検知するようにした。S1/S1共通のデータ処理回路部 (0.91kg) が別にあり、切り替えて使用するためにS1とS2は同時に使えない構成となっている。
以下の表は、LiDARおよびLRFの仕様である。また図9にはやぶさ初号機のLiDARの写真を示す。
表2 LiDAR、LRF仕様
| LIDAR、LRF仕様 | |||||
| 機器 | 測定目標 | 計測レンジ | 誤差 | 計測周期 | 重量 |
| LIDAR | 機体の高度 | 40m – 60km | ±1m(50m時) ±10m(50km時) |
1回/秒 | 3.67kg |
| LRF-S1 | 7 – 100m | ±10cm(10m時) ±3m(100m時) |
5回/秒 | 1.45kg | |
| LRF-S2 | サンプラーホーンの長さ | 0.5m – 1.5m | ±1cm | 20回/秒 | 0.41kg |
図11 (出典:JAXA) はやぶさ初号機に搭載されたLiDAR
2.2 はやぶさ2
はやぶさ2のレーザー高度計
「はやぶさ2」が搭載しているレーザー高度計(LIDAR)は、レーザーパルスの往復時間から距離30m~25kmを測定することができる。往復時間は、10ナノ秒(1億分の1秒)程度である。
レーザー高度計の動作を、図11に示す構造図を使い以下に説明する;―
右側にあるコントローラーは、光が目標まで行って反射して返ってくるまでの時間測定、レーザーの発射指示、探査機システムとのやりとりが主な役割。コントローラーからの指示で発射されたレーザーは、ビーム・エキスパンダーというレンズ系で指向性を鋭くして目標へ向かう。このとき、レーザー光の一部をPIN-PD(PIN Photo Diode)へ送って、コントローラーに発射の正確な時刻を知らせる。惑星表面で反射して返ってきた微量の光は、カセグレン型の望遠鏡でAPD(Avalanche Photo Diode)上に集光されて微量の電流に変換される。この電流はアンプで適当な電圧レベルに変換され、タイミング検出器でデジタル信号となって、コントローラーに光が返ってきた時間を知らせる。例えば、30kmであれば、数十兆分の1の強度になって返ってくる光を検出して、往復で200マイクロ秒(1万分の2秒)の時間測定をすることになる。ただし、この光量は距離の2乗に反比例するため、30mになると30kmのときの100万倍も強い光が入ってくることになり、受信回路は広い範囲のゲイン調整(電圧レベルの調整)が要求される。
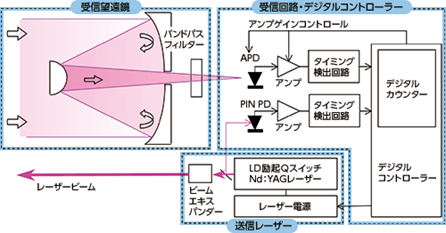
図12 (出典:宇宙科学研究所) レーザー高度計の構造
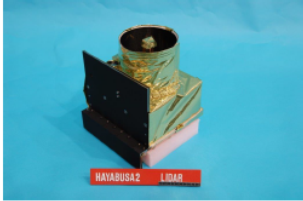
図13 (出典:JAXA) はやぶさ-2のLiDAR
LIDARによる小惑星リュウグウの表層と内部の研究
「はやぶさ2」に搭載されるレーザー高度計は距離を測り、探査機運用に役立てるとともに、リュウグウの形状モデル作成に活用する。また、レーザー高度計は送信光と受信光のレベルを計測することができる。送信光と受信光を比べることで小惑星表面の反射率を調べる。さらに、「はやぶさ2」レーザー高度計にはダスト検出機能が付加されており、世界初の小惑星ダストの発見に挑む。サイエンスチームは地形・反射率・ダスト検出により、小惑星表層環境の変遷を調査する。
2.3「かぐや」のレーザー高度計による月面探査
月周回衛星「かぐや」(SELENE)は、2007年9月14日に打上げられた月探査機である。「かぐや」は高度約100 kmの極・円軌道を周回する主衛星と、より高い楕円軌道を周回する2機の子衛星(「おきな(リレー衛星)」・「おうな(VRAD(ブイラド)衛星)」)から構成された。「かぐや」には14種類のミッション機器が搭載され、アポロ計画以来最大規模の本格的な月の探査を実施した。
レーザー高度計(LALT: Laser Altimeter)は、主衛星から月面に向かってレーザー光を発射し、月面で反射された光が戻るまでの往復時間を測ることで主衛星と月面間の直線距離を測る装置である。レーザーの反射を利用することで極域のクレータの中など日の当たらない場所の地形も測定できる点が特長である。
2007年11月26日から取得されたデータのうち、図13は2007年12月12日および25日のデータに処理を行ったオリエンタル盆地の地形高度(Topography)を示している。
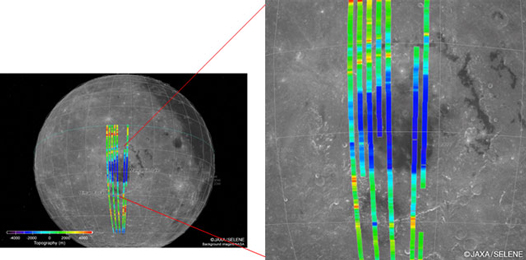
図14 (出典:JAXA宇宙科学研究所) LALTから得られた月面の地形高度(Topography)
オリエンタル盆地(19.4S/92.8W付近)付近
レーザー高度計の諸元は以下の通りである。また構造を図15に示す。
NASAのClementineに搭載されたレーザー高度計(LIDAR)と比較すると、Clementineは、垂直分解能が約100mであり、両極域のデータは観測していない。また、Clementineによる観測データの間隔は、軌道沿いの平均間隔が20kmで、軌道間の間隔は約60km。これに対して、LALTは、垂直分解能5m、赤道域で平均約2km四方に1点という間隔での月全球の観測を実施した。
表3 レーザー高度計諸元
| 質量 | 20kg |
| 寸法 | 306x450x408(LALT-TR) 301x241x88 (LALT-E) |
| レーザー波長 | 1064nm |
| 測定範囲 | 50km~150km |
| レーザー出力 | 100mJ |
| 測定周期 | 1Hz |
| 測定精度 | 5m |
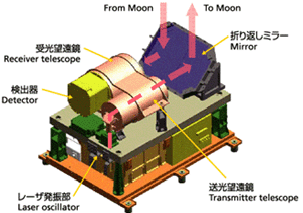
図15 (出典:JAXA) LALT-TRの内部構造
2.4 JAXAの今後のLiDAR開発
平成30年8月2日に宇宙開発利用部会(文部科学省 科学技術・学術審議会)において報告された「研究開発ミッション(デブリ除去技術実証,ライダー観測技術,再使用型宇宙輸送システム)の検討状況について」によれば、今後のJAXAのLiDAR開発に関して以下の指針が示されている。この中でLiDARに関する指針の要約を以下に示す。
(1)LiDARの高精度な構造物の高さ計測機能と、L-bandSAR等との統合利用により、森林バイオマス*推定の高精度化(精度50%向上)を図り、パリ協定に基づくインベントリ(CO2吸収源)の高精度な情報提供等の可能性を実証する。
(2)宇宙用LiDARの実用化に向け長寿命化技術を実証する。
(3)レーザー光の走査技術、波長の高安定化を確立することで、スキャン型LiDARおよびドップラーLiDARの開発を可能とする。
(4)cmクラスの地形情報(数値標高モデル:DEM)の整備、高精度な風向風速情報の取得により、航空路予測の高精度化や大気・気象観測に用いる大気大循環モデルへの応用が期待できる。
*バイオマス:動植物から生まれた、再利用可能な有機性の資源(石油などの化石燃料を除く)
図16は、LiDARに要求される光伝搬距離とレーザー光強度を用途別に示したものである。
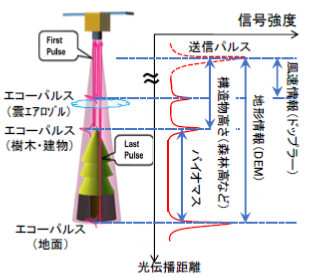
図16 (出典:JAXA) LiDARの適用対象と距離・信号強度の関係
―以上―
本稿作成の参考にした記事等は次の通り。
Wikipedia:月レーザー測距実験
NASA:A Beam of LITE: 25 Years of Earth-observing Lidar in Space
Wikipedia:ICESat
Wikipedia: ICESat-2
NASA:Lunar Crater Observation and Sensing Satellite (LCROSS)
Universities Space Research AssociationLunar and Planetary Institute:Clementine Explores the Moon
Wikipedia: クレメンタイン (探査機)
Wikipedia: CALIPSO
NASA: CALIPSO
Photonics.com Jan. 2018): NASA’s CATS Lidar Instrument Ends 33-Month Mission
NASA:CATS
NASA: Global Ecosystem Dynamics Investigation Lidar (EVI-2) (GEDI on ISS)
University of Maryland: GEDI ECOSYSTEM LIDAR
JAXA: はやぶさ2 ONC/LIDAR開発報告
JAXA宇宙科学研究所: 科学衛星 小惑星探査機 はやぶさ
JAXA宇宙科学研究所:「はやぶさ2」のレーザー高度計
Wikipedia: はやぶさ(探査機)
Wikipedia: はやぶさ2
JAXA宇宙科学研究所:月周回衛星「かぐや」(SELENE)
JAXA宇宙科学研究所:「かぐや」、レーザ高度計および月レーダサウンダーによる観測を実施
JAXA:レーザ高度計(LALT)
JAXA:研究開発ミッション(デブリ除去技術実証,ライダー観測技術,再使用型宇宙輸送システム)の検討状況について