2022-06-17(令和4年) 松尾芳郎

図1:(General Motors) ロッキード・マーチン/ゼネラル・モーターズ開発の月面探査車(LMV)は、有人着陸に先立ち月面に着陸する。ロッキード・マーチンでは、LMVを含む総重量1.5 tonの月面着陸機 (lander)を開発中で、間も無く完成する。

図2:(General Motors)着陸した探査車(LMV)はスロープを降りる。LMVが着陸機から月面の降りる様子。

図3:(Lockheed-Martin and General Motors) 月面に着陸した月面探査車(LMV)は、基地に適した候補地を探し、有人着陸を待つ。LMVには撮影器材を備え、有人着陸船が到着する様子を撮影し送信する。
米国の有人月面探査計画の中で9番目となるアポロ15 は 1971年7月26日に着陸、2週間の初の長期探査を行った。船長デービッド・スコット(David Scott)と月着陸船 (Lunar Module )操縦士「ジェームス・アーウイン(James Irwin)」は月面探査車(LRV=Lunar Roving Vehicle)で着陸地の近くを18時間にわたり探査、月の岩石77 kgを採取、持ち帰った。
(When the Apollo 15 landed on the Moon in July 26. 1971, they brought along with then the first Lunar Roving Vehicle for exploring the Mount Hadley area and correcting soil and rocks 77 kg. and brought back.)
ローバー(LRV)で月面探査の範囲が広がったので、その後の3回のアポロ・ミッションでも、同型ローバー(LRV)が使われ、合計で90 km (56 miles)、11時間の走行を記録した。
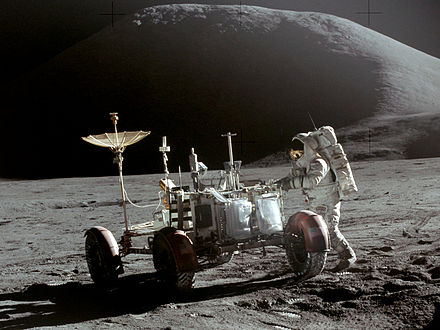
図4:(NASA/David Scott) アポロ15の船長デービッド・スコットが撮影した、ルナー・モジュール(Lunar Module)操縦士ジム・アーウインと月面探査車(LRV)。背景のハドレー山(Mount Hadley)の麓の区域を調査した。探査車はボーイング製、自重209 kg、乗員2名と装備を含めると重さ700 kgになる。4個の車輪はそれぞれ200 W (4分の1馬力)のモーターで駆動、時速は10 km/hr程度。
アポロ15で使われた月面探査車(Lunar Roving Vehicle)の出現から60年以上が経過した。
報道されているようにNASAは数年後に有人月面探査を再開すべく「アルテミス計画 (Artemis program)」を開始、準備を進めている。その中で関連業界に対し全く新しい[月面探査用車両(Lunar Terrain Vehicle)]の開発を提案するよう求めている。これに応えて業界から多くの提案が寄せられている。
ここでは最も有力視されている「ロッキード・マーチンとゼネラル・モーターズ」の共同提案[LMV]を中心に、「JAXAとトヨタ自動車」共同提案などを含めて紹介したい。
「ロッキード・マーチン」は、これまで50年間NASAの有人宇宙飛行、各種宇宙船、宇宙探査機の開発で協力を続けており、「アルテミス計画」では「オライオン(Orion)」宇宙船の開発を担当している。
「GM (General Motors)」は、「アルテイアム・バッテリー(Ultium battery)」駆動電気自動車」の開発・実用化で業界をリード中で、近い将来全ての車両を電気自動車にしようとしている。さらに自動運転の実用化にも取組んでいる。
「ロッキード・マーチン」と自動車の「GM」が取組む新構想の月探査車はどのような車か。この探査車は「ルナー・モビリテイ・ビークル(LMV=Lunar Mobility Vehicle)」と呼ばれ、有人着陸の前に月に着陸し、宇宙飛行士の到着を待つ。
これまで人類が探査した月面は全体のおよそ5 %に過ぎない。これからNASAは「アルテミス計画」で本格的な月面の探査に乗り出す。ロッキード・マーチンとGMは、宇宙飛行士を乗せ月面上を遥か遠方まで行動できる次世代型の「月面ローバー(LMV)」を開発する。「LMV」は4輪駆動で、電源にはGM・LG化学が共同開発した「アルテイアム・バッテリー(Ultium battery)」セルを搭載し、この電力で走行する。
バッテリー・セルは自動車用として完成済みで、NMC (Nickel, Manganese, Cobalt)で構成されている。現在NMCA化が進められており、コバルトの使用量を70 %削減しアルミニウム(Aluminum)への代替が進められている。
アポロ時代のローバーは、着陸地点から僅か7.6 kmの範囲までしか行動できなかったが、アルテミス計画では、新開発の「月面ローバー(LMV)」で遥か遠方まで走行して、アポロ時代を遥かに超える科学調査を目論んでいる。
月面ローバー(LMV)は単に遠方に行けると云うだけでなく、人力操縦、自動操縦、いずれも可能で、無人走行ができる、そして人員だけでなく貨物輸送も可能。従って宇宙飛行士は、月を周回する宇宙基地「ゲートウエイ(Gateway)」から遠隔操作でローバー(LMV)を動かして長距離の探査をできる。
月面ローバー(LMV)は、地球上のオフロードより遥かに険しい月の表面を、夜間の超低温下でも走行できる。特に月の両極地方は日射がなく暗黒の世界で、大量の水や揮発性の物質が存在すると考えられており、LMVによる重要な探査目標になっている。
宇宙飛行士は、着陸地点の周囲の探索にはLMVを人力操縦で乗り回し、両極地方など遠方の探索は遠隔操縦でする、と言う使い方になる模様だ。
月は地球と違って昼夜は地球時間の14日毎に入れ替わる。すなわち、2週間に及ぶ夜間の -280 ℉ (- 170℃) の極超低温から昼間の +260 ℉(+127℃)の高温に耐えられるよう月面ローバー(LMV)は作られる。温度差だけでなく、高い放射能環境下、地球の6分の1の重力、表面は月の砂(レゴリス)覆われる厳しい環境、それから打上げ時の強い衝撃に耐えられるように、全てのシステムを設計・製作する必要がある。
月面ローバー(LMV)の開発には今年4月から新たにカナダの企業MDAが参加する。MDAは国際宇宙ステーション(ISS)のロボット・アームを開発した企業で、「LMV」が使う岩石採取用のロボット・アームの開発を担当する。
月面ローバー(LMV)は、アポロ時代の探査車(LRV)と同じ2人乗りだが、大型で座席背後にたくさんの荷物を積める。そして2週間に及ぶ夜間も活動を続けられる。アポロ時代の探査車(LRV)は夜になると電源がなくなり動けなかった。
NASAでは最初の有人月面着陸を「アルテミスIII」、つまり3機目の「アルテミス」で実施するが、最近打上げ予定を遅らせ2025年以降にする、と発表した。これに伴い月面探査車(LMV)と着陸機(lander)の打上げは、2024年秋に変更された。
JAXAとトヨタ、共同開発の有人与圧ローバー「ルナー・クルーザー(Lunar Cruiser)」
SORA-Q
JAXAは、「変形する月面探査ロボット・SORA-Q」を月着陸実証機「スリム(SLIM)に搭載し2022年度中に2回月に着陸させる。これで月面の詳細な状況を撮影し、その後に続く有人自動運転技術や走行技術に必要な月面データを取得する。
「SORA-Q」は野球のボールとほぼ同じ大きさで、小型月着陸実証機「スリム」から放出され球体で着陸すると左右に広がり、中からカメラを搭載した頭部が立ち上がり、後ろにスタビライザーを伸ばした状態に変形する。そして左右に開いた外殻を車輪にして走行し、周囲を撮影する。動力は搭載バッテリーを使うので作動時間は1時間弱となる。
「SORA-Q」は、2016年からJAXAと玩具メーカーのタカラトミーが筐体の設計を開始、2019年にソニーが、2021年に同志社大学が加わり4者で開発された極めてユニークな月面探査機である。

図5:(JAXA/タカラトミー/ソニー/同志社大学)変形型月面探査ロボット「SORA-Q」。直径約8 cm、重さ250 grの球形ロボット。

図6:(JAXA/タカラトミー/ソニー/同志社大学)着地すると球体が左右に割れ、中からカメラが現れる(黄色の部分)。カメラは両面にあり、走行する方向の前後を撮影できる。
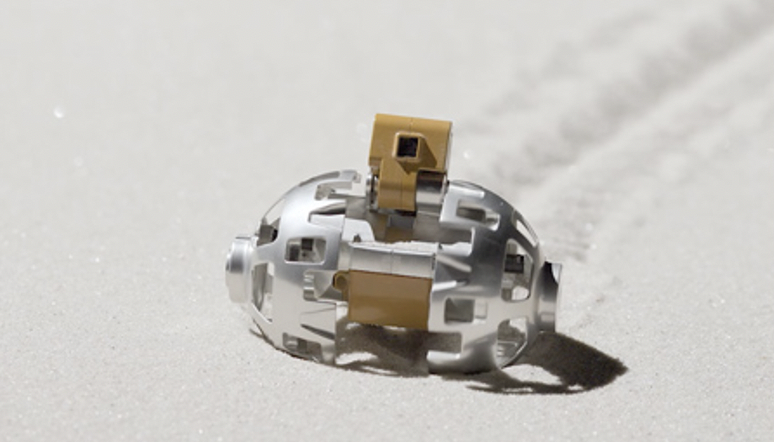
図7:(JAXA/タカラトミー/ソニー/同志社大学)左右の球体部分が車輪となり動く。写真は車輪を同時に動かすバタフライ走行時を示す。左右の車輪を別々に動かしてクロール走行もできる。
月着陸実証機「スリム(SLIM)
「SLIM (Smart Lander for Investigating Moon)」とは、画像航法を使って今後の惑星探査に必要なピンポイント着陸技術を開発し、それを月面で実証しようという装置。これで「降りやすいところに降りる」から「降りたいところに降りる」という高精度(誤差100 m)の着陸が可能になる。
「SLIM」には2個の小型プローブ「LEV=Lunar Excursion Vehicle」を搭載し、月面着地の寸前(高度1.8 m)でプローブを放出する。プローブは、月面から地球にデータ送信をする「LEV-1」と、前述した月面を走行し写真撮影をする「SORA-Q」こと「LEV-2」の2つ。「SORA-Q」・「LEV-2」が撮影した画像は「LEV-1」で中継、地球に送信される。
打上げは、JAXAが別途計画中のX線分光撮像衛星(XRISM)と相乗りで、今年中(2022年)にH-IIAロケットで予定している。
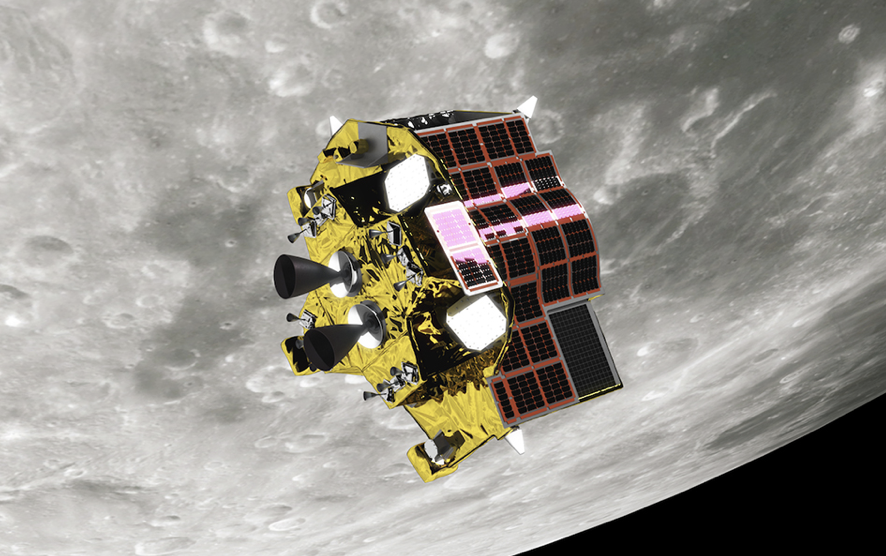
図8:(JAXA) 月着陸実証機「スリム(SLIM)。左の黒い2本はメインスラスター、この周囲には小さな補助スラスター(12本)[がつく。白く光る2枚の板は着陸用レーダーアンテナ、ピンクの覆は太陽電池パネル。
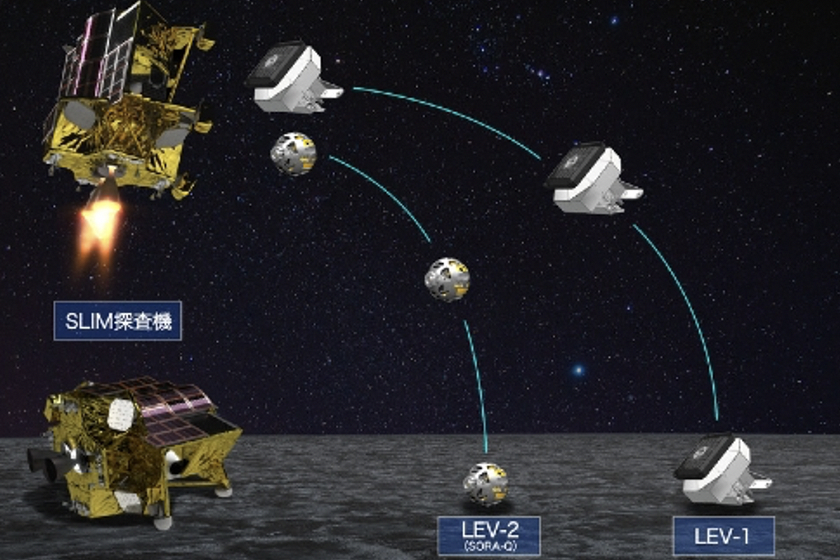
図9:(JAXA、タカラトミー)データ通信用「LEV-1」は「SORA-Q」・「LEV-2」より大きく重量は2.1 kg、移動は月面を跳躍(高さ約3 m)して行う。
有人与圧ローバー「ルナー・クルーザー (Lunar Cruiser)」
JAXAは、前述した「SORA-Q」2基を2022年中に送り込み、月面の砂礫/レゴリスの詳細な状況を把握する。その成果を基にして、トヨタ自動車と有人与圧ローバー「ルナー・クルーザー (Lunar Cruiser)」の研究開発を進める。「ルナー・クルーザー (Lunar Cruiser)」は、2020年代の後半、2027年頃の打上げを目指している。
「ルナー・クルーザー」は、与圧されたキャビン内で乗員は与圧服無しで仕事をできるようにする。ロボット・アームは、日本のベンチャー企業「GITAI Japan」が開発を担当している。
GITAIは2021年末に搭載予定のアーム試作機を公開した。「ルナー・クルーザー」は、搭載の水素燃料電池(hydrogen fuel cell)で10,000 kmの長距離走行を目指している。昼間の時間帯は装備するソーラー・パネルで電力を補給できる。これで月の極地方の探査が容易になる。
「ルナー・クルーザー」は、6輪駆動の燃料電池自動車で、全長6 m、幅5.3 m、高さ3.8 mで、マイクロバス2台分の大きさになる。与圧キャビンは13 m3、で2~4名を収容できる。
我国はNASAを中心とした国際的な月面探査計画に参加を表明済み。その一つ、月の資源利用の可能性を探るため、JAXAは極地方探査ミッションを2029年から5年間・毎年1回、合計5回実施する構想を検討している。その中核になるのが「ルナー・クルーザー」。
図10:(JAXA・トヨタ)JAXA・トヨタ共同開発の有人与圧ローバー「ルナー・クルーザー」。2人乗り、全長6 m、幅5.3 m、高さ3.6 mのかなり大型の6輪駆動車。左側面にソーラーパネルを収める筒が描かれている。昼間はここからソーラーパネルを立ち上げ、バッテリーへ電力を補充する

図11:(JAXA・トヨタ)正面から見た「ルナー・クルーザー」。天井には通信用パラボラアンテナ。

図12:(JAXA・トヨタ)「ルナー・クルーザー」の右側面の図。タイヤはブリジストン製ダブル装輪でステンレススチール製の網目構造、月面の砂礫・レゴリス上を走行できる。水素・酸素の燃料タンクはカートリッジ式にして車両後部から交換できる仕組みが検討されている。

図13:(GITAI Japan) 「ルナクルーザー」に搭載予定のロボット・アーム試作機。「グラップル・エンド・エフェクター」(右端)を装備する。「グラップル・エンド・エフェクター」には可動爪があり、様々なツールを接合し、使うことができる。「グラップル・フィクスチャー」を結合すれば機械結合、電力結合、通信結合する機能が使える。さらに、ローバー壁面に設置された「グラッブル・フィクスチャー」に嵌め込むことで、ローバーのどこにでも移動して使える。

図14:(ブリジストン)月面は空気がないので空気入りゴムタイヤは使えない。-170℃から+120℃の温度差、強い宇宙放射能、それにタイヤ1本当たり数百キロの重量に耐えることが必要。月表面は微細な砂礫・レゴリスが堆積していて剛体の車輪ではすぐに沈んでしまい走行できない。このため接地圧を低く、接地面積を大きくする柔らかさが必要。さらにレゴリスには硬い岩石も含まれているので、強靱さも必要。このため金属製、ステンレス製網目構造のダブル・タイヤを開発、試験を続けている。
ロシアと中国は
アポロ時代には、当時のソビエトはルノホート(Lunohod) 1号(1970年)、同2号(1973年)を月に着陸させ、運用に成功した。これは無人・遠隔操作ロボット探査機で月面で写真撮影して送信した。
中国は2019年1月3日、無人月探査機「嫦娥4号(Chang’e -4)」と一緒に月面探査車「玉兎2号(Yutu-2)」を月の裏側に着陸させている。以来3年間で1,000 m以上走行し、1,000枚以上の月面写真を撮影した。「玉兎2号」は中継通信衛星「鵲橋」経由で地上局と通信、探査目標などの指示を受け写真を撮影、地上に報告している。
終わりに
最初に述べたように昨年末にNASAは「[月面探査用車両(Lunar Terrain Vehicle)]の開発提案を業界に求めている。これは「アルテミス計画」で宇宙飛行士が、月の南極を含む地域の探査に使う車両だが、開発費などはNASAは一切負担しない。目的にかなう物であれば使用する、と云うのがNASAの立場だ。即ちここには「宇宙開発の民営化を進める」方針が明示されている。
ロッキード・マーチン/GMの月面探査車「LMV」がその有力候補、続いて2020年代末に長距離走行を目指すJAXA・トヨタの「ルナー・クルーザー」がある。
この他に参加に手を挙げているのは次の各社;―
ノースロップ・グラマンは昨年11月にテキサスの[Intuitive Machine]社およびコロラドにある[Lunar Outpost]社と共同で月面車両の開発に乗り出す、と発表した。
テレダイン・ブラウン・エンジニアリングは、1960年代にNASA向けに月面車を試作した経験があるが、今回は[Sierra Space]社および「北米ニッサン」社と組んで4輪駆動の探査車を開発する、これにはニッサンが開発済みの無人搬送車「e-4ORCE」の技術を転用する、と発表した。
カリフォルニアのベンチャー企業[Venturi Astrolab]社は今年3月に、月面探査車[FLEX =Flexible Logistics and Exploration]ローバーを試作、発表した。2人乗り4輪駆動で貨物1,500 kgを輸送できる。
2020年代後半に実施される有人月面探査が待たれる。
―以上―
本稿作成の参考にした主な記事は次の通り。
Aviation Week May 16-29, 2022 “Lunar Uber” by Guy Norris
Lockheed Martin News “Lockheed Martin-General Motors Team to Further Lunar Exploration with Autonomous Moon Rover”
GM Newsroom “Lockheed Martin, General Motors Team up to Develop Next-Generation Lunar Rover for NASA Artimis Astronauts to Explore the Moon”
GM.com “Ultium Battery Powered Electric Vehicles”
GM.com “GM Reveals All-New Flexible Platform and Ultium Batteries”
GITAI Japan 2021-12-14 “トヨタの月面有人与圧ローバーに搭載するロボットアームの試作機を公開“
JAXA・トヨタ自動車ニュース”JAXAとトヨタ、有人与圧ローバーの愛称を「Lunar Cruiser」に決定“
クルマ・ホームページ 2020-09-09 “
ブリジストン・タイヤ ニュース
Motor Trend Aug. 31, 2020 “The Lunar Cruiser is TOYOTA’s Very Real Land Cruiser for the Moon” by Kelly LinWords